Offerings
自律走行ロボット、自動運転、デジタルツインのための空間把握(自己位置推定と3D地図・点群生成)における最も困難なチャレンジを解決する技術群とサポートを、顧客の成功を約束する多様なパッケージで提供します
パッケージ
アプリケーション
自律走行ロボット、自動運転、RTLSのための
自己位置推定
デジタルツイン、スマートシティのための
3D実空間再現
コアエンジン
ソフトウェア&
ハードウェア
パッケージ
エンド・トゥ・
エンド・
ソリューション
Coming soon
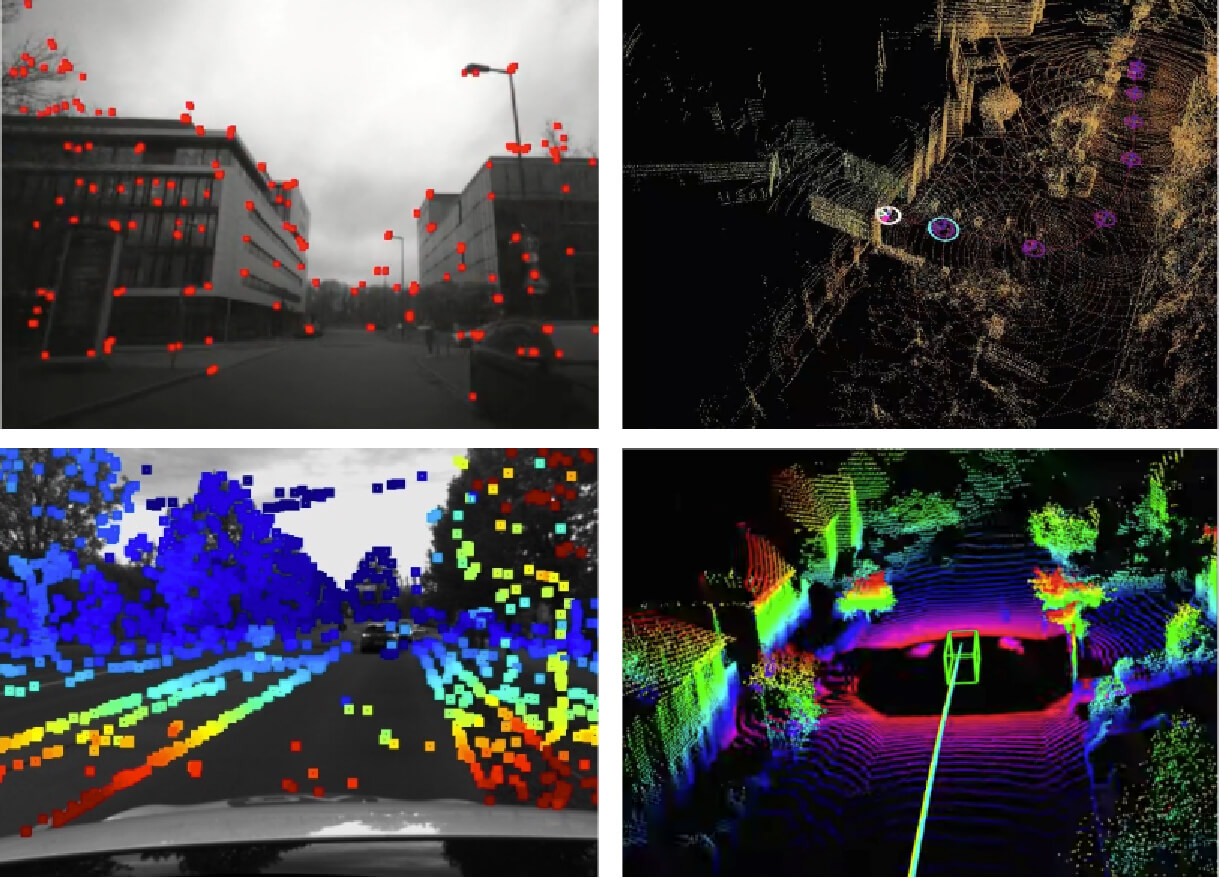
自己位置推定
コアエンジン(ソフトウェア): KdRobot
KdRobotは高い精度とロバスト性を有する6DoFの位置・姿勢を、多様な環境にて提供します
- ビジュアル(カメラ)と3D-LiDARを自由に組み合わせ可能な独自のSLAMアルゴリズム
- IMU、GNSS、オドメトリー、マーカーなどと柔軟な統合を可能にするセンサーフュージョン
- 多様な環境・シナリオでパフォーマンスを発揮(屋内/屋外、整地/不整地、異なる照明/天候環境、移動物体や環境変化)
- ハードウェアアクセラレーション対応かつ軽い計算リソース消費
- C++ライブラリやROS/ROS2ラッパーでの提供
- マルチセンサーフュージョン
- センサー構成に対して柔軟
- スケーラブルなマップ
ハンドリング・統合・更新 - ハードウェア
アクセラレーション
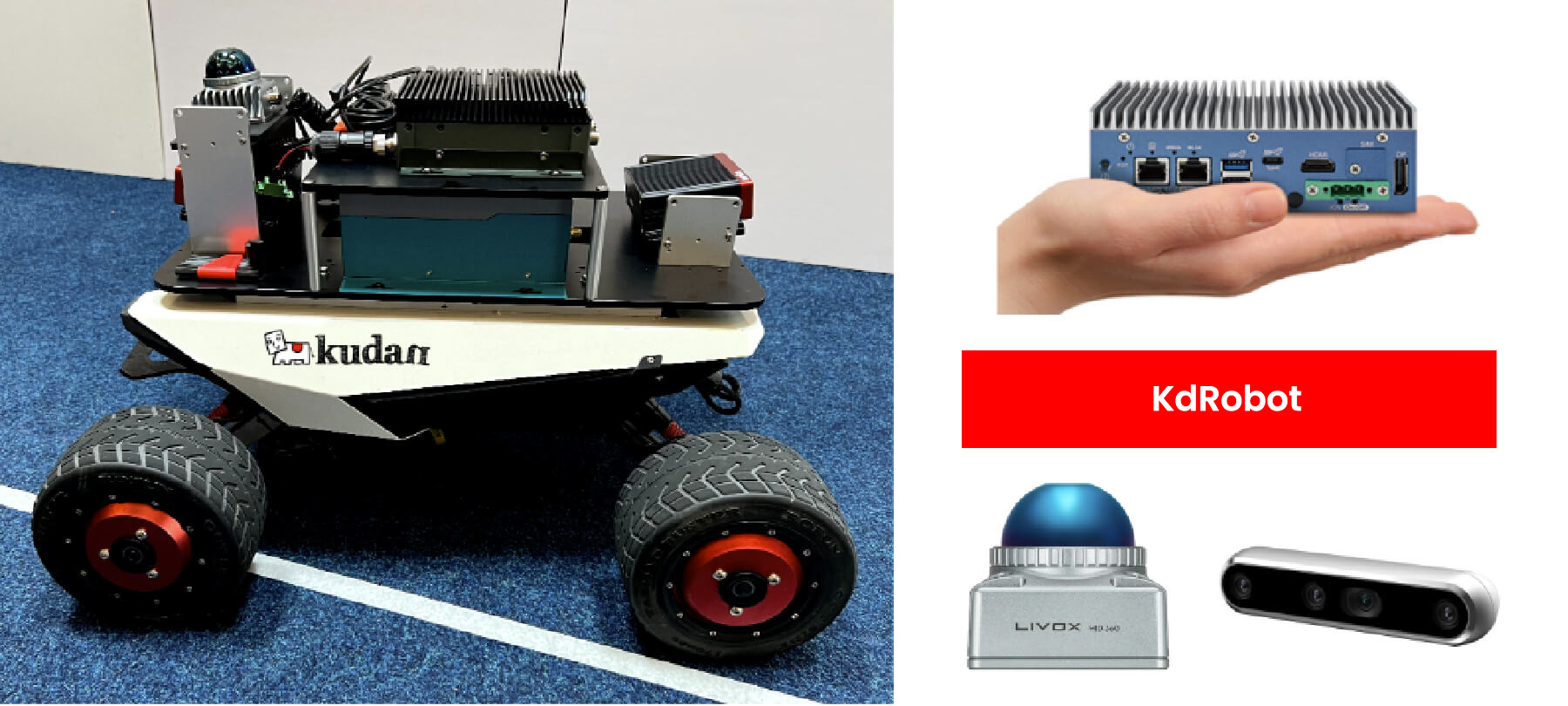
ソフトウェア&ハードウェアパッケージ: 自律走行ロボット Dev Kit (MRDK)
顧客の製品開発を急加速するレファレンスキット
- KdRobotとハードウェア(センサ、プロセッサ)を統合
- 様々なユースケースでの要求に答える柔軟なセンサ構成
- ROSベースのロボットに対して効率的に統合可能
- 機能と性能評価を短期間で実現
- フルスタックのナビゲーションシステムもサポート可能
3D実空間再現
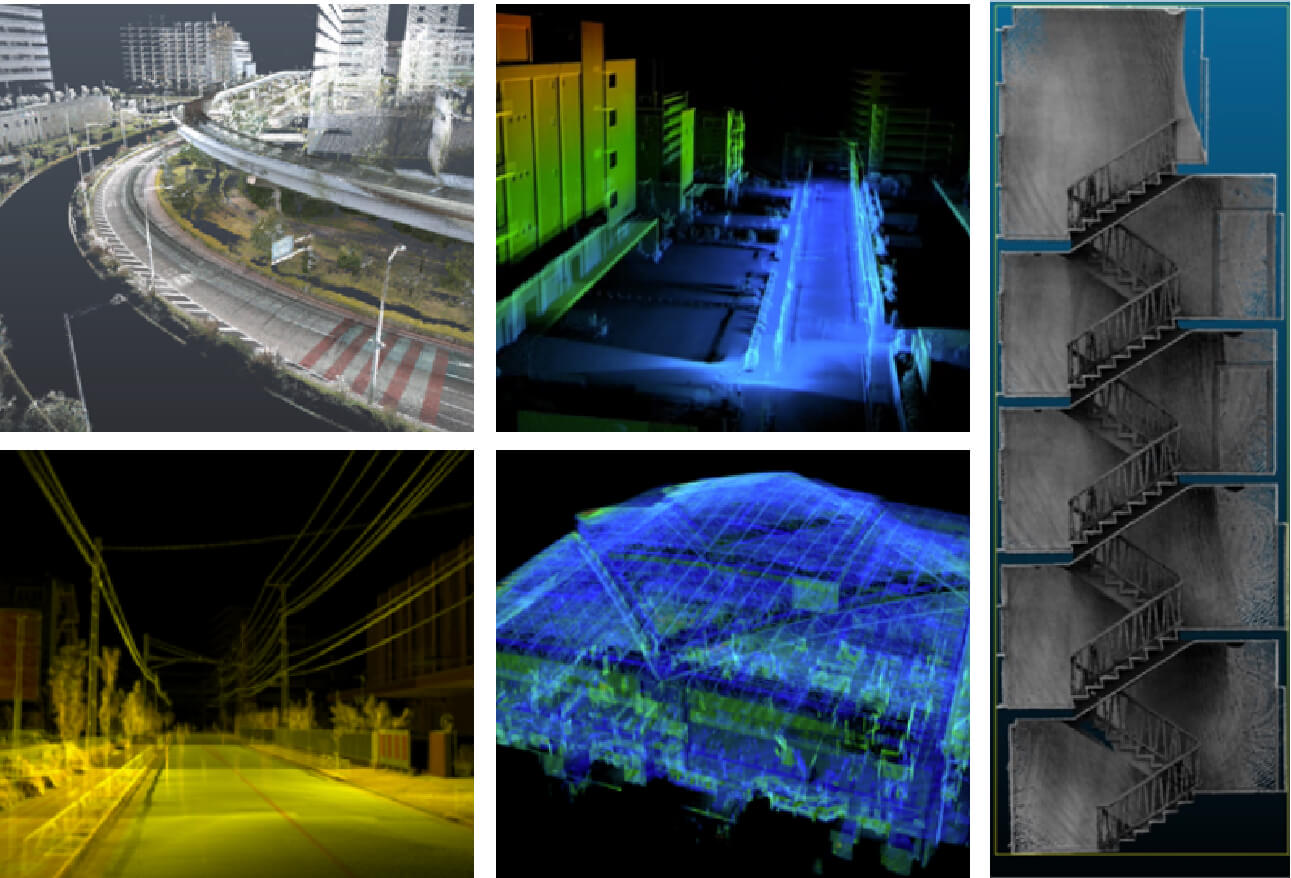
コアエンジン(ソフトウェア): KdMapping
KdMappingは高い精度かつシャープな点群によって、3D空間が関わる様々な分野の業務DXを可能にします
- 独自の3D-LiDAR SLAMアルゴリズム(カメラ、IMU、GNSSと統合)
- 様々なユースケースに対応する柔軟なセンサー構成
- あらゆるシナリオに対して機能可能(屋内/屋外、移動物体や外乱の多い環境、シティスケールまでの拡張性)
- ハードウェアアクセラレーション対応かつ軽い計算リソース消費
- 様々なOSに対応したC++ライブラリでの提供
- Multi Sensor Fusion
- Sensor agnostic
- Hardware
Accelerated - Hand-crafted and
Deep-learned Feature
ソフトウェア&ハードウェアパッケージ: モバイルマッピング Dev Kit (MMDK)
顧客の製品開発を急加速するレファレンスキット
- KdMappingとハードウェア(センサー、プロセッサ)を統合
- 機能と性能評価を短期間で実現
- 効率的なマッピング作業を可能にするユーザーフレンドリーなインターフェース
- 幅広いパッケージ種類(手持ち、バックパック、車載など)
- 3D点群を用いたソリューション開発のためのカスタマイズやサポートも提供

ソフトウェア&ハードウェアパッケージ: Xgrids Lixel Scanners
リアルタイムで現場データの取得が可能になり、顧客の業務プロセス改善及び短時間でのデータ取得が可能
- リアルタイムで結果が確認できるため、再作業を避けることが可能
- オールインワンの統合設計により持ち運びが簡易
- クリーンでクリアな点群データの取得が可能
- マルチな環境に適応可能(屋内、屋外、防塵、防水対応)
- 写真のような高品質なカラー点群

エンド・トゥ・エンド・ソリューション: デジタル・アセット・マネジメントシステム
設備・資産を空間情報と統合することで、オペレーション&メンテナンスの改善と革新的なDXを実現する:
- 製造業、ユーティリティ設備管理、総合施設管理、オペレーション&メンテナンス業務などに最適
- 3D空間再構成の技術を、作業者が運用可能なアプリケーションやツールに統合
- 一連のワークフロー:設備・資産のマッピング > フォトリアルなデジタルツインの生成 >セマンティック処理 > 拡張可能でTPM利用可能なフォーマットでデータベース化
- 業務効率30%向上、移動時間25%削減、探索時間30%削減、部門横断でイノベーションと効率化のための情報共有を実現
-
Fast asset
mapping
-
Photo-real digital
twin asset -
Build/ extend
asset database
-
Database
Optimisation