Our Technology
当社の自己位置推定及び環境地図作成ソフトウェアであるGRAND SLAMは、商用グレードの性能を備えており、多数のセンサーの潜在能力をフルに活用することで、お客さまの環境やユースケースに関係なく価値をもたらすことができます。
Demo videos






GrandSLAM

センサ統合による最高のパフォーマンスを実現
- カメラやLiDARをプライマリセンサとして、ToF、IMU、GNSS、ホイールオドメトリなど幅広いセンサデータに対応します。
- 商用グレードの性能:高精度、低レイテンシ、高堅牢性、安定性などソフトウェアの基本機能だけでなく、大規模マップへの拡張や、他システムとの統合、クロスプラットフォームなどに対応しています。
- 他のソフトウェアやアプローチと比較しても大幅なハイパフォーマンスを実現しており、お客様のシステムの能力を最大限に引き出します。
センサ構成の高い自由度とお客様環境での高いパフォーマンス
- 高いパフォーマンスを得るために高価で複雑なセンサを使う必要はありません。様々なセンサに柔軟に対応させることが可能です。
- 多くのマルチセンサシステムが抱える困難と問題点を、私たちのセンサ間の調整と同期技術によって解決することができます。
Visual SLAM
商用グレードの高速処理、低メモリ消費、高精度、高堅牢性
- Kudanは商用に耐える独自のVisual SLAMを開発してきました。
- オープンソースや他の商用アルゴリズムは、一般的なユースケースでも精度やレイテンシなど多くの困難を抱えています。
- Kudan SLAMは、刻一刻と変化するリアルで困難な状況にあっても、他のアルゴリズムと比較して処理時間の大幅短縮、高精度、かつ高堅牢性を実現しています。
- 評価用のデータセットは下記をご利用ください。
データセット1:屋内ロボットユースケース向けデータ
データセット2:AR/VRユースケース向けデータ
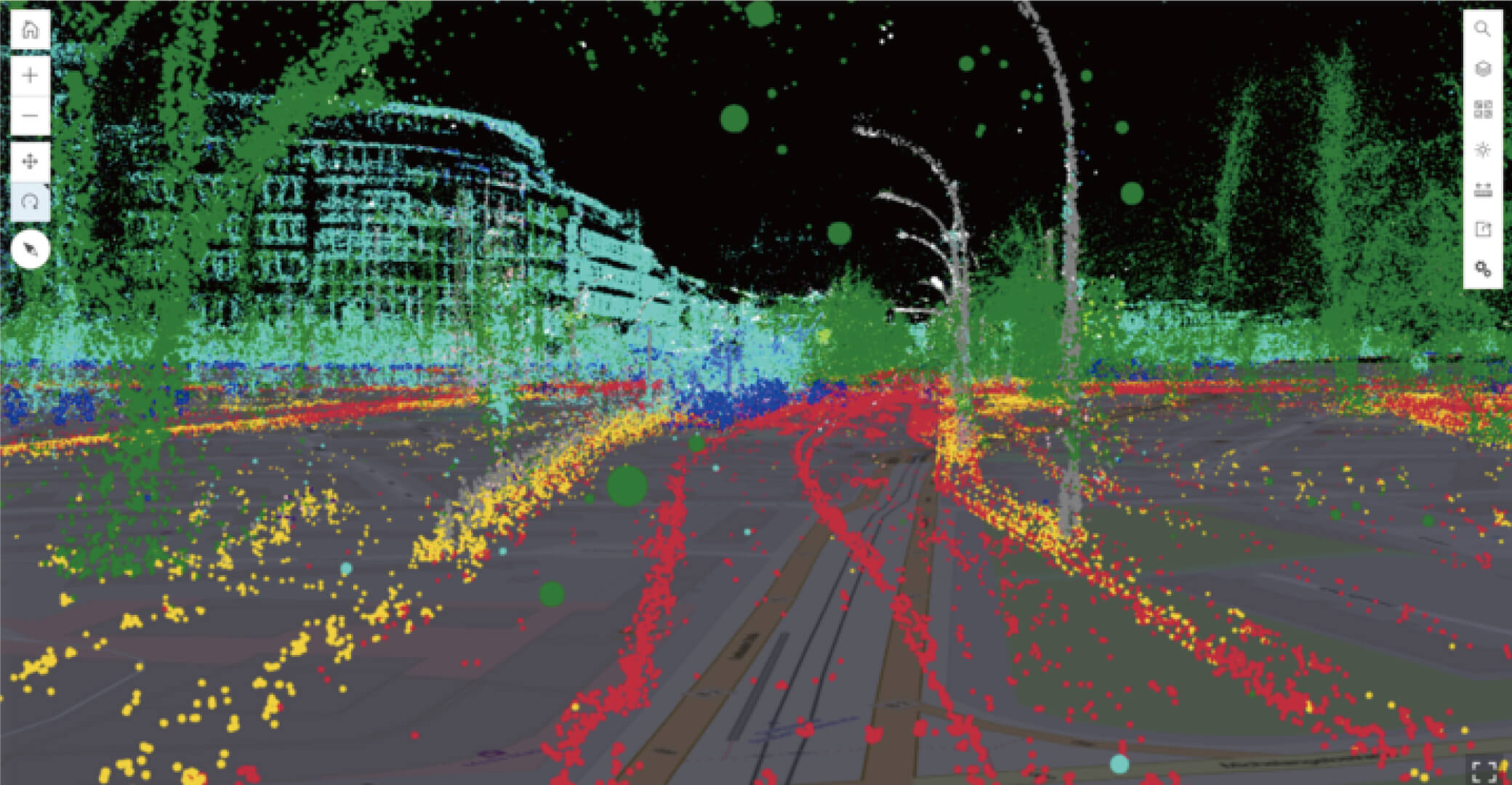
Lidar SLAM
これまでのLiDARを用いた自己位置推定と環境地図作成が抱える問題を克服し、より高い精度、マップサイズの縮小、低レイテンシを実現
- Visual SLAMの研究開発で培った深い専門技術によって自己位置推定誤差1cm以内、マップサイズの300倍縮小など圧倒的な性能を実現しています。
- IMUセンサとの統合によってほぼゼロレイテンシでのポーズ推定が可能です。
- 当社のLiDAR SLAMは一般的な回転式だけでなく、ソリッドステート式、プリズム式などほとんどのタイプのLiDARに対応しています。
- 環境地図作成プロセス中に、LiDARからのデータに含まれるブレなどを検知し、より鮮明な点群に補正するだけでなく、位置認識の精度の向上も行います。
- 評価用のデータセットは下記をご利用ください。
データセット:屋外自動運転・ロボティクスユースケース向けデータ(近日アップロード予定)
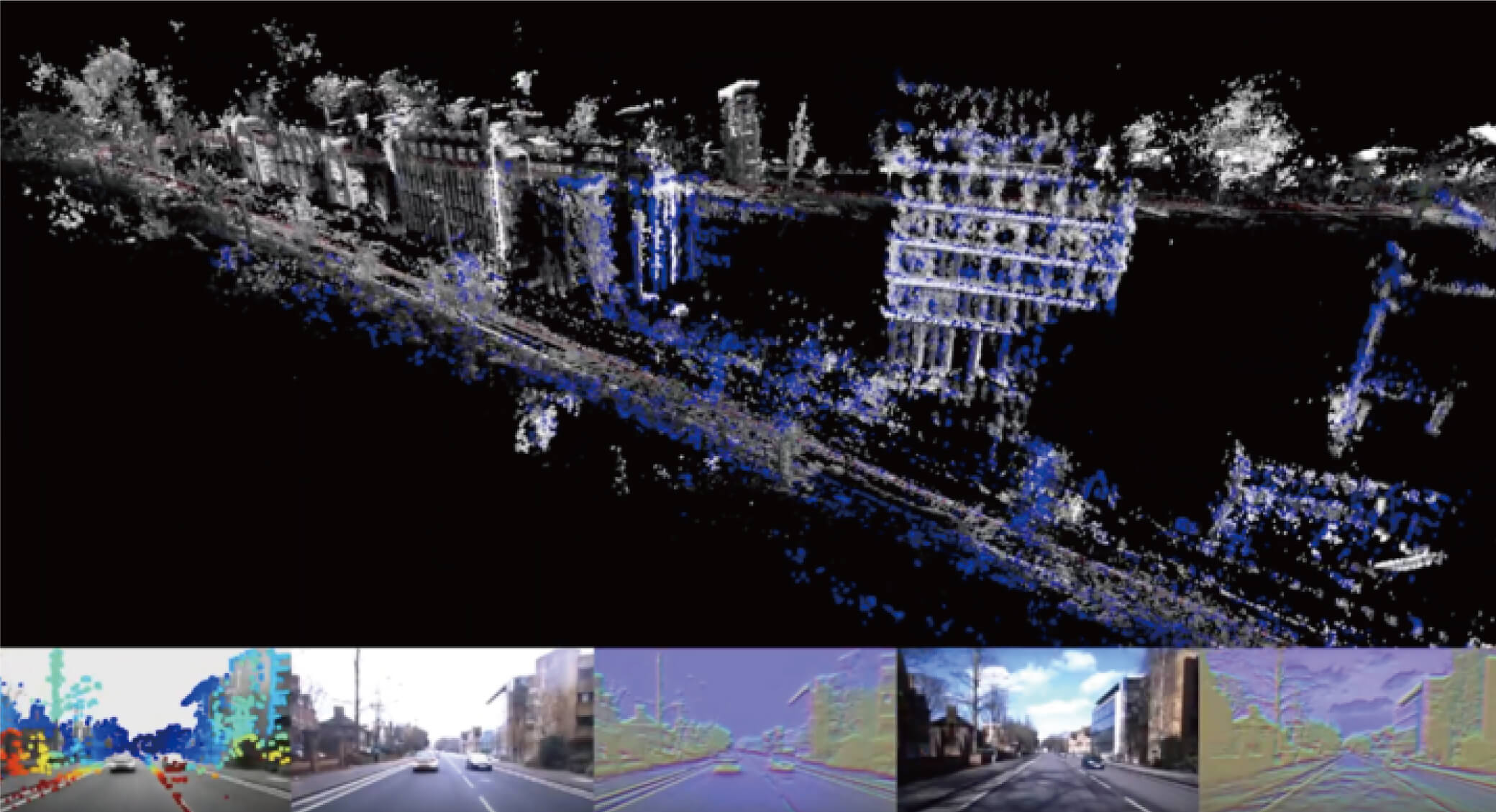
SLAM X AI
ARTISENSEのGN-Netによるリローカライゼーション:AIの援用によって環境変化時の位置推定の安定性を大幅に向上
- 経時的に風景や条件が変化する困難な状況での自己位置推定を可能としています。
- AIによって”深層特徴量”を計算することで、風景の見え方が変わっていても正確な位置を推定します。
- 変化を検知した場合は地図を自動的に更新します。
Tight coupling and Time synchronization
センサ情報の単純なフィルタリングではなく、センサ間の時間同期によってすべてのセンサ情報を一つのシステムに統合
- 疎結合(ルースカップリング)と呼ばれる一般的なセンサフュージョンに対して、KudanとArtisenseが採用する方法は密結合(タイトカップリング)です。
- Kudanグループはカメラ、LiDAR、GNSS、IMUセンサを密結合した独自かつ唯一のシステムを開発しました。
- Kudanのセンサ統合では、通常問題となるセンサの適切な時間同期の問題を、マイクロ秒レベルの誤差で同期することで解決しています。
- このセンサ統合による自己位置推定は幅広いユースケースに対して圧倒的な精度と堅牢性を提供することができます。


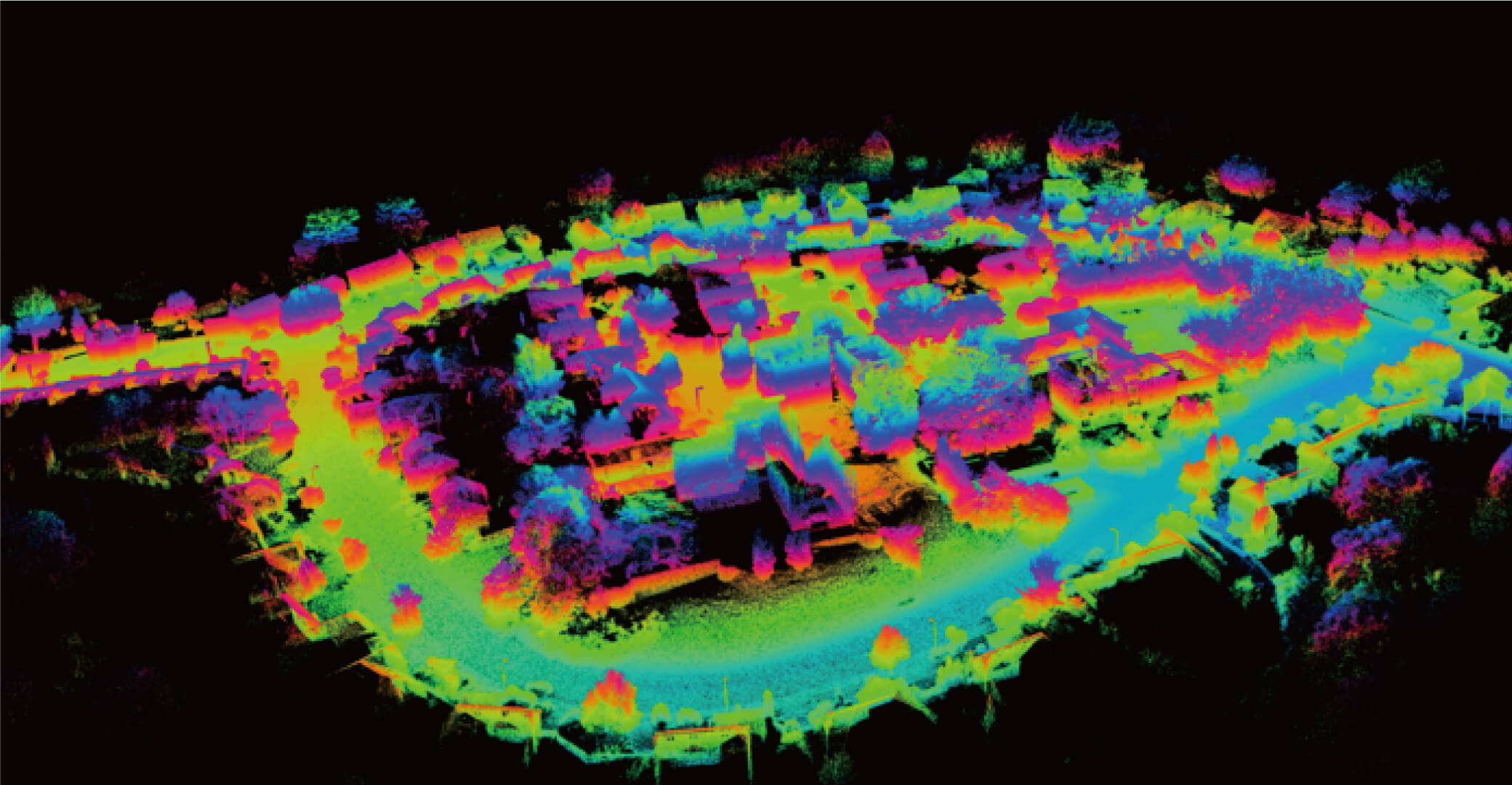
Extrinsic calibration and motion blur correction
当社の幅広いコンピュータービジョン技術による外部パラメータのキャリブレーションやデータのブレ補正によって、LiDARメーカーに対しても高い認識性能と正確な点群マップの出力が可能
- 外部パラメータのキャリブレーションを正確に行えなかったり、動きによって生じるデータのブレは、あらゆるユースケースにおいてLiDARで得られる点群の劣化を目に見える形で引き起こしてしまいます。
- 正確な自己の位置や動きをLiDAR SLAMによって得ることで、高速移動や高速回転が生じても、品質の高いキャリブレーションや、より鮮明な点群マップを得ることができます。
- 得られた鮮明な点群マップによって、自己位置を推定するだけでなく、画像認識をはじめとするシステムの安全性と信頼性を向上させることができます。
Map handling
広域地図管理のための実用的な機能
- SLAMによって作成された環境地図の保存、読み込み、統合、分割、アンロードなどのマップ操作を簡単に行うことができます。
- 異なる環境条件で作成された同じエリアのマップを複数同時に読み込ませることで、天候などの環境条件の変化に対応することができます。
- ソフトウェア動作中にマップのロード、アンロードができるため、無制限のスケールでの自己位置推定が可能となります。
Processor and sensor optimization
センサやプロセッサへの最適化によって大幅な高速化と低消費電力化を実現
- Kudanは、センサやプロセッサを提供するプレイヤーとの積極的な協業を通して、KudanSLAMアルゴリズムの最適化を行ってきました。
- 特定のセンサ/プロセッサとの組み合わせにより、圧倒的な処理速度、堅牢性、精度、低消費電力を実現します。