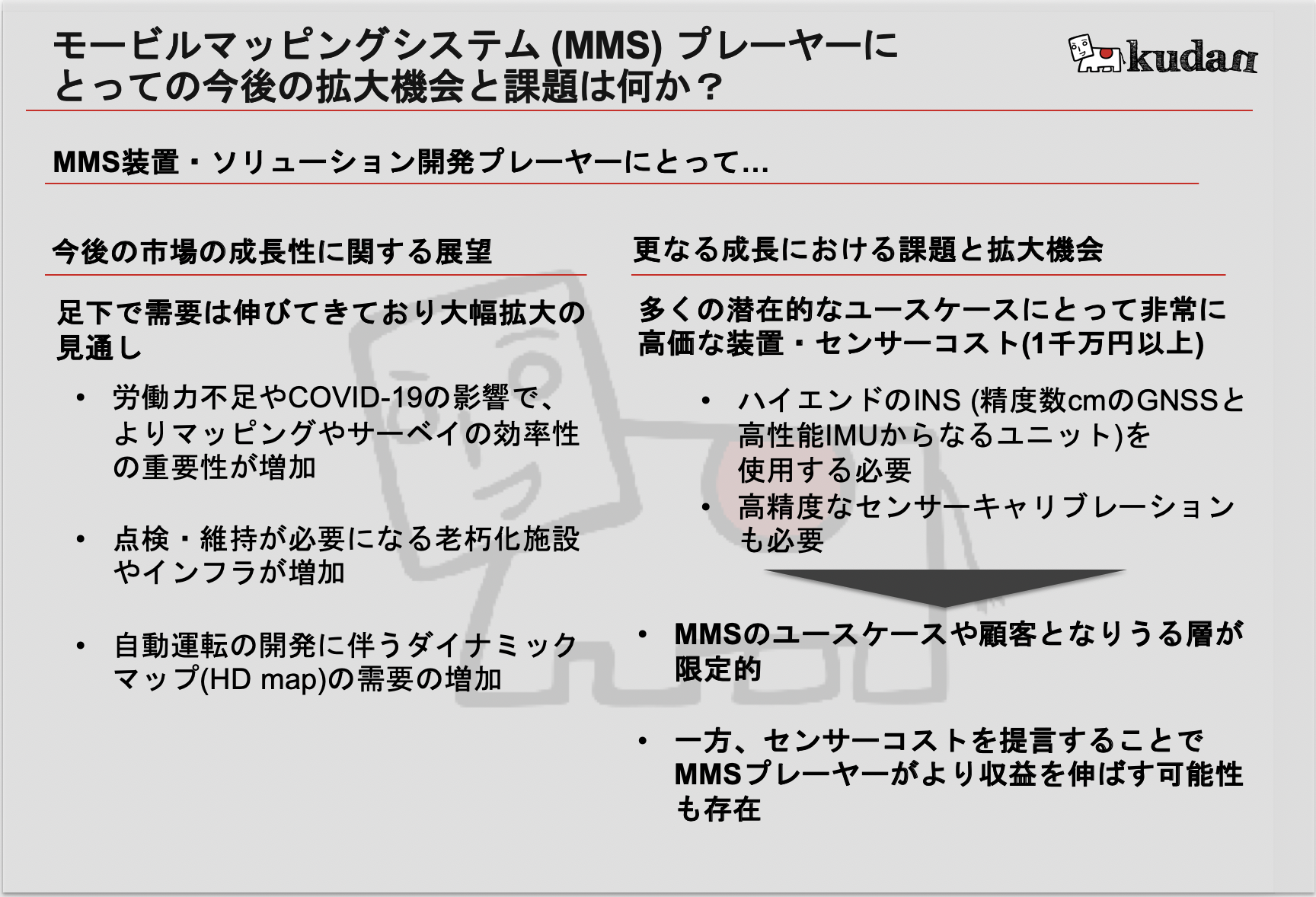
モービルマッピングシステム(MMS)市場は、マッピングプロセスのさらなる効率化が期待されていること以外にも、モニタリング対象であるインフラの老朽化の加速、並びに、HDマップの需要の増加などにより、特に、車両に搭載されるMMSが急成長しています。
しかし、車両搭載型のMMSは、システムにおける十分なロバスト性および正確性を確保するために、非常に高価な1千万円を超えるセンサーを必要としています。これが原因で、MMS市場のプレイヤーが急速に拡大することや、より多くの収益を得ることを難しくさせていたのです。
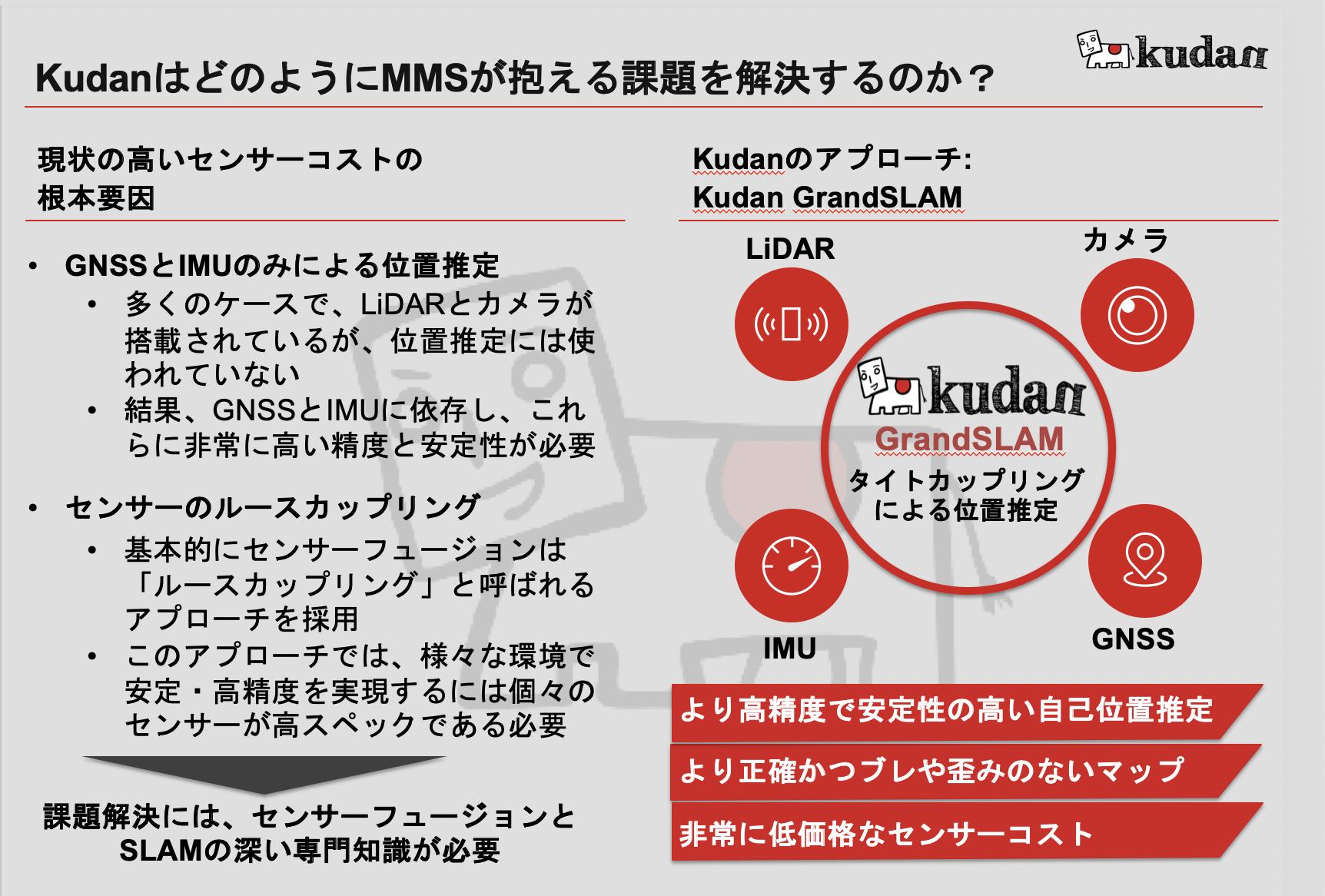
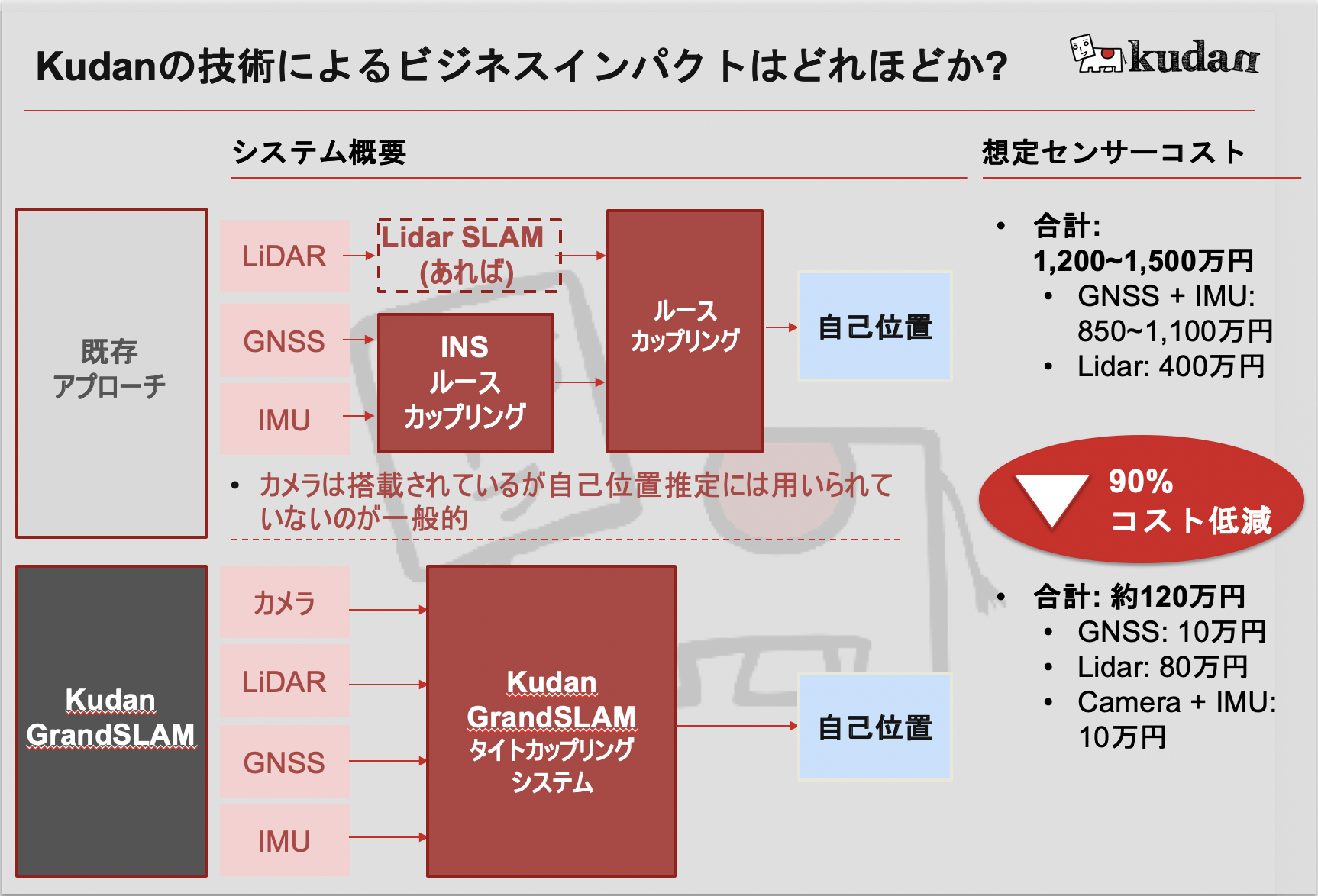
KudanSLAMのローカライゼーション・マッピングのソフトウェアライブラリであるKudan GrandSLAMは、LiDAR、カメラ、GNSSおよびIMUのすべてのセンサーを「タイトカップリング」することによって、MMSプレーヤーとユーザーに正確で歪みやブレのないマップを提供しながらも、センサーコストの大幅な削減(最大90%の削減)を可能にしています。