自動運転やロボティクス領域のいくつかの適用事例では、精度と安定性に加えて、大規模な運用への適応能力が非常に重要
3D-Lidar SLAMは、GPSが利用できない環境でも、非常に安定的かつ高精度に車両やロボットの位置を把握することができます。これは3D-Lidar SLAMのもつ最大の強みであり、自動運転やロボティクスにおいて非常に重要な役割を果たしています。しかし、商用自動車の自動運転や屋外配送ロボットなどのいくつかの大規模な適用事例では、精度が良く、安定していることは最低条件でしかありません。これらに加えて、大規模な運用に耐え得るスケーラビリティを伴っている必要がありますが、多くの(特にオープンソースの)SLAMでは、この点があまり重視されていないのが現状です。Kudanでは、これらのニーズに答えるために、大手自動車OEMとの自動運転プロジェクトを通じて2つの機能を開発・実装しました。それが「マップ統合」機能と「マップストリーミング」機能です。今回は「マップ統合」機能について紹介します。
マップ統合:自動運転やロボティクスにおける大規模な地図作成・更新のコストを低減可能に
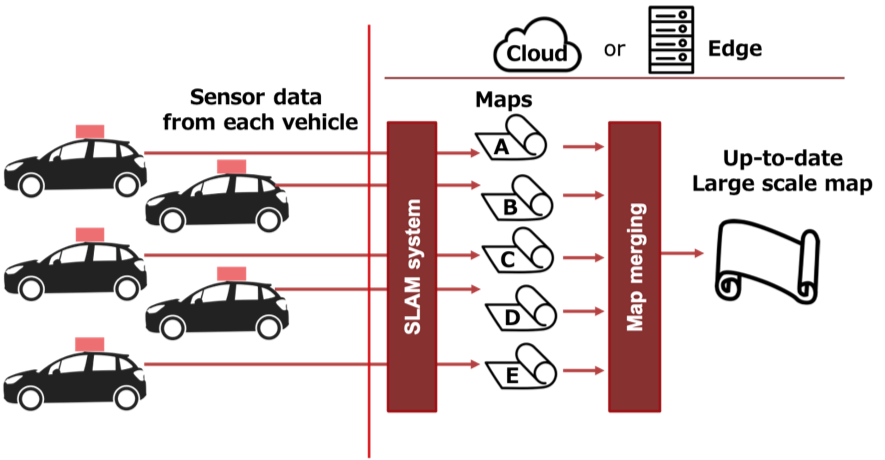
自動運転・ロボティクスにおいては、多くの事例で、車両やロボットの位置を把握するために、運用を想定している領域の地図を事前に作成しておく必要があります。その事前に作成した地図上で自分がどこにいるのかをSLAMで理解し、その情報を他の道路情報(レーン情報など)や周囲の物体の位置情報と組み合わせることで、次の行動を決定していきます。大規模な適用事例となると、この地図作成に非常に大きなリソースが必要となりかねません。「マップ統合」機能は、GPS情報と点群情報を組み合わせて、いくつかの地図を一つの大きな地図に統合する機能です。
デモ動画はこちら: Kudan Lidar SLAM: Map merging function
この機能によって、地図データ収集の業務を分散することができ、ソリューションを提供するプレーヤーはこれらの地図データを一度に大量に収集・生成する必要がなくなります。さらに、この機能の利点は、「コラボラティブマッピング(協調地図作成)」を可能にすることです。
「コラボラティブマッピング」とは、大規模な地図データ収集を、特別な地図データ収集車両やロボットだけではなく実際に自動運転する車両やロボットでも行い、効率的にデータを収集するというコンセプトです。自動運転車や自律走行ロボットは、地図を自己位置の把握に活用しつつ、センサデータをデータサーバに送信します。そしてそのサーバ上で、マップ統合機能を使うことにより、それらの複数の小さなセンサデータから一つの大きな地図の作成が可能になります。なお、これらの地図は最新のセンサデータに基づいており、この最新のセンサデータで作成された地図を活用することで、地図の「鮮度」を効率的に維持できるほか、メンテナンスコストも大幅に低減できます。
Kudanは、前述の自動車OEMと都市規模の自動運転プロジェクトを行っており、本マップ統合機能を使用しながら、欧州のとある都市の地図を作成しています。また、これらの機能を活用し、他の大規模なエリアでの運用を想定するプロジェクトにも積極的に取り組んでまいります。
【Kudan株式会社について】
Kudan(東証上場コード: 4425)は機械(コンピュータやロボット)の「眼」に相当する人工知覚(AP)のアルゴリズムを専門とするDeep Tech(ディープテック)の研究開発企業です。人工知覚(AP)は、機械の「脳」に相当する人工知能(AI)と対をなして相互補完するDeep Techとして、機械を自律的に機能する方向に進化させるものです。 現在、Kudanは高度な技術イノベーションによって幅広い産業にインパクトを与えるDeep Techに特化した独自のマイルストーンモデルに基づいた事業展開を推進しています。
詳細な情報は、Kudanのウェブサイト(http://kudan.io/jp/?lang=ja)より入手可能です。
■会社概要
会 社 名: Kudan株式会社
証券コード: 4425
代 表 者: 代表取締役CEO 項 大雨