Mapping Dev Kit
Handheld version
Kudan ハンドヘルド
モバイルマッピング開発キット
本製品のビジョン
非GPS環境を含む様々な環境で使用できる、シンプルかつ低価格でありながら高品質なモバイルマッピング装置の開発・利用を可能にします。
1つか2つの3D-Lidarと処理用コンピュータ、バッテリーやディスプレイで構成され、Kudan 3D-Lidar SLAMをベースにした3D点群生成ソフトウェアが含まれています。また、外部IMUやGNSSを追加することも可能です。

本開発キットの構成
センサー
- Ouster Lidar ないし Hesai Lidar
- (オプション) Xsens IMU ないし INS
コンピユーター
- Intel NUC
他ハードウェア
- ポータブルディスプレイ、マウス、キーボード
- 電源アダプタ
- ハンドヘルド用三脚、スキャン用ハーネス
- 開発キット収納ケース
ソフトウェア
- Kudan Lidar SLAM (KdLidar)
- OS: Ubuntu 20.04
- ROS Noetic 使用

様々な環境やニーズに
対応可能な
センサオプション
本開発キットを選ぶ理由
本開発キットは最も重要な機能と使いやすさに集中し、業界最高レベルの費用対効果・価格対性能を実現
低価格で高い精度を実現
- Kudan 3D-Lidar SLAMの利用により、非常に高価なINSやIMUを必要とせず様々な用途で求められる精度を実現
非常に簡単なセットアップ
- 収納ケースをあげて1時間以内にはスキャン可能な状態に可能。複雑なトレーニングが不要
柔軟なパラメータ設定が可能
- 既定の推奨パラメータで使用可能かつ、詳細なパラメータチューニングも可能

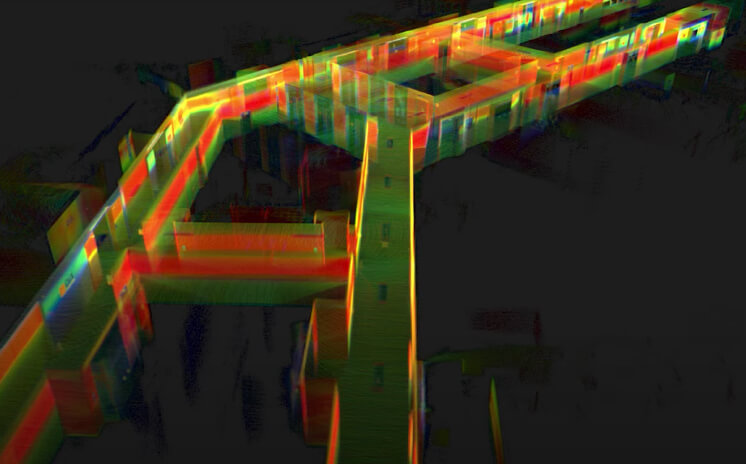
取得点群のサンプル
ハンドヘルド開発キットと車載用開発キットで取得・生成した点群の例
-
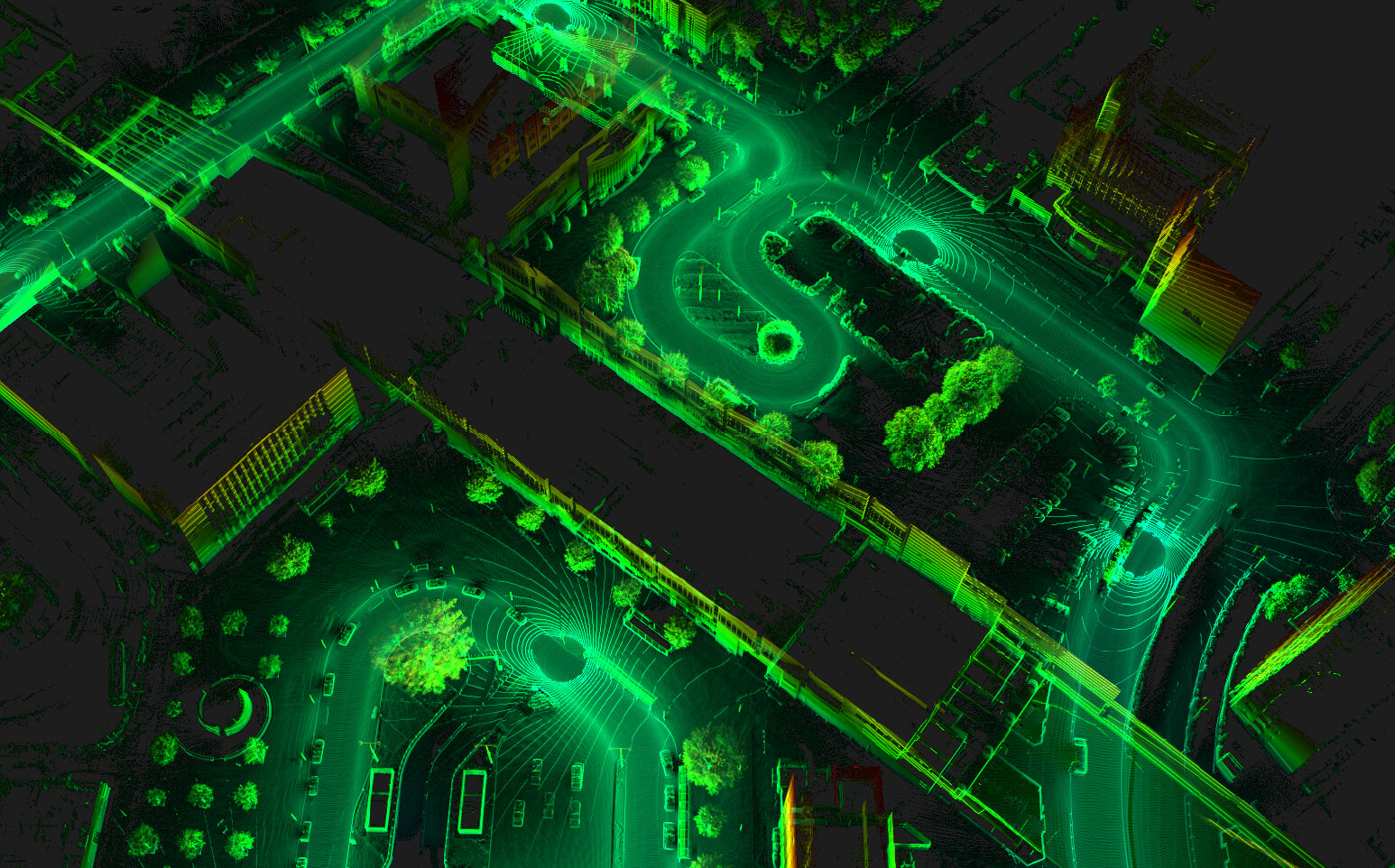
Urban area (near a station)
-
Indoor office
-
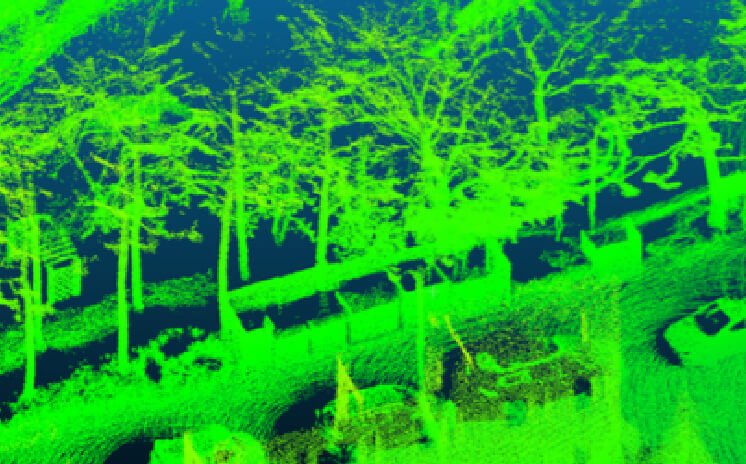
Urban residential
-
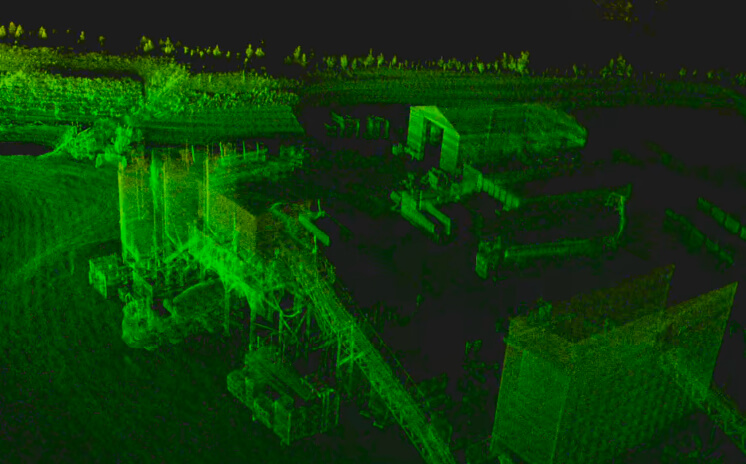
Quarry
-
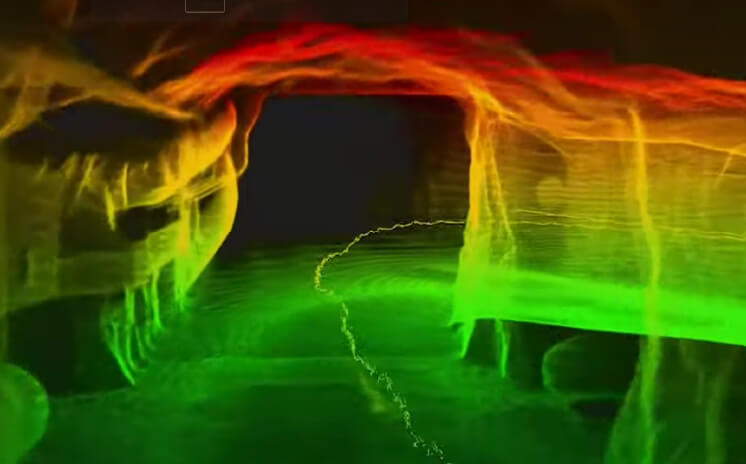
Underground cave