前回の“Kudan 3D-Lidar SLAM (KdLidar)ユーザー適用事例”からしばらく経ちましたが、その間にも様々なプロジェクトや更なる性能向上を行ってきました。
今回のデモ動画では、マッピング領域で最も典型的な環境・セットアップでの結果を紹介しています。
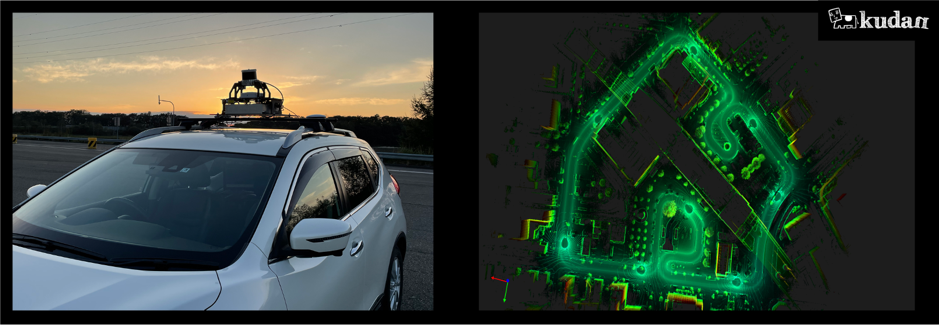
- GNSSによる正確な位置把握を難しくするビルや屋根付きの場所も含んだ市街地でのマッピング(北海道の帯広駅ロータリー周辺)
- 少し傾斜させた3D-LidarとINS (GNSSとIMUを組み合わせた位置把握センサ)を車両に搭載したセットアップ
こちらがそのデモ動画です - Kudan 3D-Lidar SLAM in Action: Vehicle Mobile Mapping in an Urban Area
このデモ動画に関しては、動画内でも詳細を紹介しているので、ここでは割愛させていただきますが、改めてKdLidarを活用する主な利点としては下記があります。
- 様々な環境で最高1cm未満の精度を実現: 様々なマッピング領域のパートナーとのテストを行い、最高で1cm未満の精度を屋内・屋外で実現
- 柔軟なセンサーセットアップが可能: 様々な3D LidarやIMU、GNSS、INSをテスト済みで互換性を担保
- 圧倒的に速い市場投入を実現::社内開発や他のSLAMソフトウェアをベースにした開発に比較して圧倒的にスピーディーなSLAMを活用した製品の市場投入が可能(Kudanには30名のSLAMに特化したエンジニアが在籍)
今後の更なるアップデートにもご注目ください!
■お問い合わせ先はこちら

