今回はKudan 3D-Lidar SLAMの「クラウドからのマップストリーミング」機能を紹介いたします。この機能は大規模な自動運転や自律走行ロボットのオペレーションに非常に強力な機能となっています。
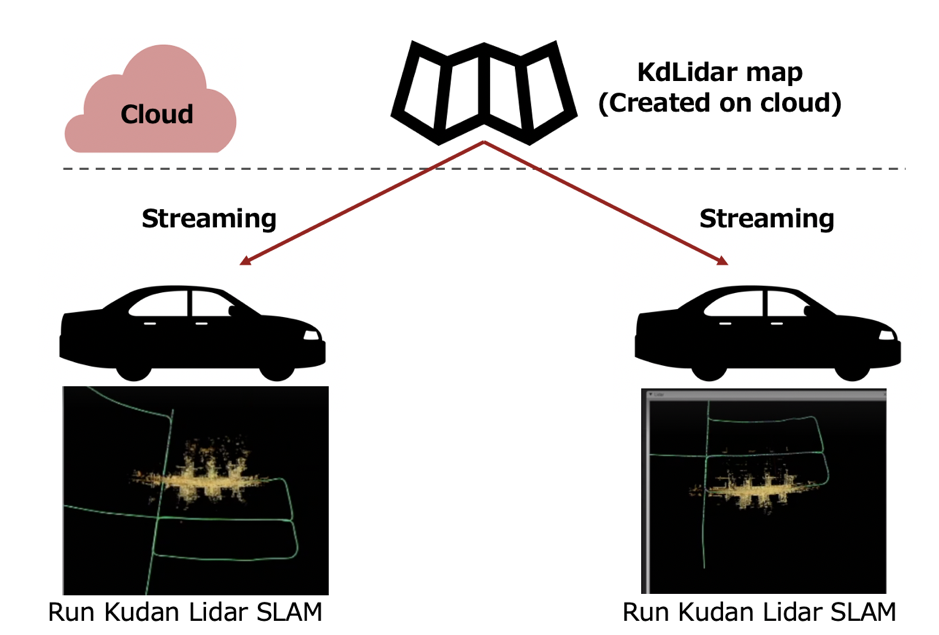
この機能を使うことで、ユーザーはたった一つの大きな点群地図をクラウドに保存しておけば、自動運転車や自律走行ロボットはこの地図から必要な部分だけをストリーミングして利用することが可能となります。こうすることによる主な利点は
- 大規模なエリアで運用する際にも、各車両に大容量の地図を搭載する必要がなく、ハードディスク・メモリの使用量を大幅に削減可能
- ユーザーはクラウド上の一つの地図を更新するだけで、車両やロボットの地図が常に最新のバージョンに保たれ、地図の更新・維持効率が非常に高い
こちらがそのデモ動画です - Kudan 3D-Lidar SLAM in Action: Map Streaming from the Cloud
このデモでは、自動運転のR&Dで頻繁に用いられる公開データセット(KITTI)を用いて、2台の車がそれぞれ、クラウド上から自車付近の地図のみをストリーミングして使用するメモリを最低限に抑えて自己位置推定を行っています。Kudan 3D-Lidar SLAMで使用する地図は、Lidarの元データに比べて数百倍圧縮しており非常に軽量あるため、通常の3G/4Gネットワークでも十分にこのマップストリーミングが可能となっています。
今後の更なるアップデートにもご注目ください!
■お問い合わせ先はこちら