今回のこちらのデモ動画では、我々の韓国におけるパートナーであるUCSがKdLidarソフトウェアとOusterのOS1-32 (Rev 6.2)を用いてスキャンした大型船舶の点群をご紹介いたします。この船舶は4階建構造になっており、その外部と内部の両方を細かくスキャンしています。 船舶のサイズはおよそ全長80mで幅20mとなっており、トータルステーションを用いた従来手法では、非常にデータ取得に時間を要するものです。

今回UCSがスキャンした船舶の外観
そもそも何故、船舶をスキャンする必要があるのか?
点群は確かに興味深いものの、そもそもどうして船舶をスキャンする必要があるのか、と思う方がいるかもしれません。このお客様の事例では、乗客が船上から海に落下する状況を検知するのに最適なカメラの位置を決めるべく3Dモデルを用いました。3Dモデルによって、実際に何度もこの船舶に訪れることなく、コンピューター上で様々な位置での結果をシミュレーションすることが可能となります。一般的に、このような大きな構造物の正確なデジタル3Dモデルを作成することで、以下のようなメリットがあります。
- 建設もしくは修理途中の進捗状況を把握可能:建設中の構造物を定期的にスキャンし進捗状況を追跡。各マイルストーンを達成できているかどうかを効率的に確認できる→ プロジェクト/予算の超過を避けることがより容易。
- 装置や設備の構造物内への設置を効率的に計画可能:クレーンなどの大型設備の設置を、正確な3Dモデルによってコンピュータ上でシミュレーションでき、計画時間と必要工数を削減し、再作業のリスクを低減。
- メンテナンス作業のための実際の構造物への訪問回数を抑制可能 → メンテナンスコストと時間を削減。
スキャン結果
ご確認の通り、点群は実際の船舶の細かいところまで捉えることができています。船舶内部は非GPS環境ですが、点群に歪みはありません。元々お客様はiPadのLidarを用いてスキャンを試みましたが、結果的には歪みが大きすぎたため利用できませんでした。また、 細いワイヤや小さな装置などの細かい物体も、通常はSLAM処理誤差やLidarの深度推定誤差により生成されるノイズにより明瞭に捉えることが難しいものとなりますが、今回のスキャン結果では非常にクリアに視認可能です。そのため、これらの点群を上で触れたような作業へ活用することができます。
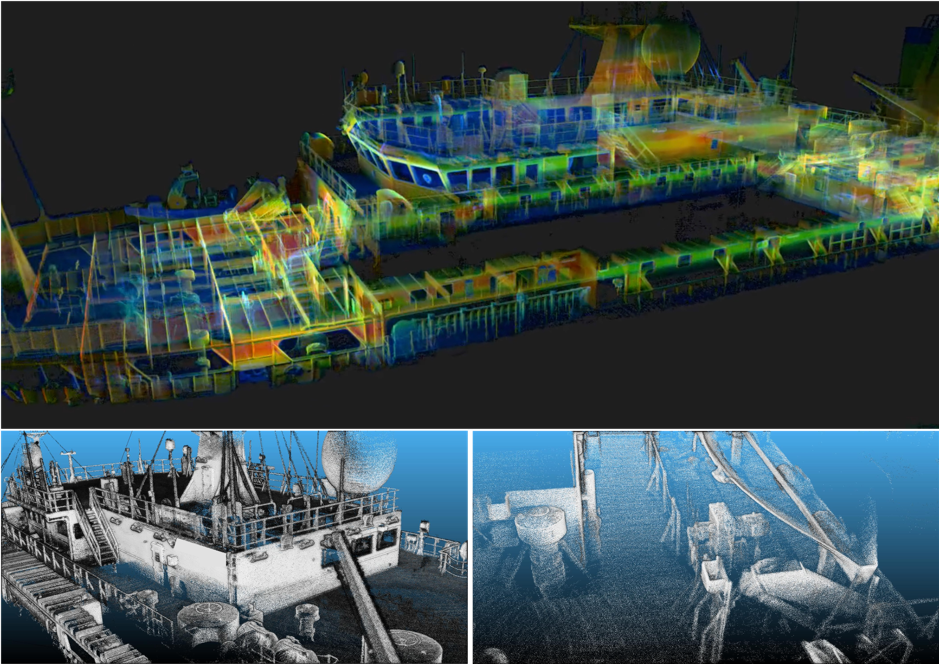
今回取得した点群の写真
今回の結果に関するデモビデオはこちらのKudan公式YouTubeよりご覧になれます。
今回紹介した点群をより細かく確認したい場合は、お気軽にご連絡ください。詳細を共有しますので、ぜひフィードバックをご確認いただければと思っております。
■お問い合わせ先はこちら