(Written by Anthony Glynn, Kudan CTO)

ロボットが倉庫の混雑した通路を進み、迅速に商品をピックアップし、配送することを考えてましょう。ロボットは、棚をはさんで商品が連鎖するような事故を避けるために、どれくらいの速さで移動し、角を曲がるときにどれくらいのスペースを空けるかを決めなければなりません。このため、ロボットは、カメラ、ライダー、車輪オドメトリーなどのセンサーからのデータを統合し、これを事前に構築された環境マップと組み合わせて正確な位置を特定するローカライゼーション・モジュールに依存しています。ローカライゼーション・システムは、位置を出力するだけでなく、その推定値がどの程度確かなものかを評価しなければなりません。この確信度は、共分散と呼ばれるもので定量化され、非常に重要でです。正確な位置データは不可欠ですが、このデータに対するロボットの確信度も重要です。もしロボットがその確信度を誤って判断し、確信しすぎたり慎重すぎたりすると、無謀な行動をとったり、過度にためらいがちで非効率的なシステムになる可能性があります。
共分散
私たちのローカリゼーションシステムは、単一の正確な位置推定に頼るのではなく、代わりに確率分布全体を出力します。共分散は、推定値をガウス分布としてモデル化することに由来し、分散の概念を多次元に拡張します。共分散はマトリックスとして表され、推定値がどの程度広がっているかという概念と、x座標やy座標のようなロボットのポーズの異なる側面間の相関の両方を捉えます。共分散が大きいほど広がりが大きいことを示し、不確実性が高いことを意味します(ロボットの真の位置はより広い値の範囲に入る可能性があります。)
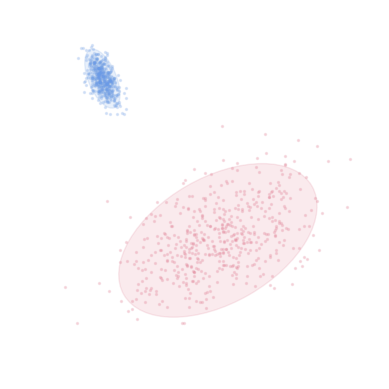
(画像:500サンプルで表される2つのガウス分布と90%信頼区間を示す楕円。青い分布は赤い分布よりも共分散が小さく、より確実な位置推定を示している)
効果的な意思決定は、共分散に大きく依存しています。システムは、その位置推定に対する信頼度が、現在のタスクを進めるのに十分かどうか、あるいは、是正措置をとって位置の不確実性を減らさなければならないかどうかを判断する必要があります。パスプランナーは姿勢の共分散を入力とすることができ、これにより移動速度とパスの安全マージンを調整することができます。
共分散はまた、異なるセンサーからの測定値を統合したり、様々な内部モジュールから出力されたポーズ推定値を組み合わせたりする際にも重要な役割を果たし、これらの情報を適切に重み付けする体系的な方法を提供します。より信頼性の高いデータは、より重視されます。これにより、最も信頼性の高い情報が、システム全体の姿勢推定に最も大きな影響を与えるようになります。
出力される共分散が、不確実性の真のレベルを正確に反映することが重要です。過信は危険であり、過信しすぎるシステムは効率が悪すぎるかもしれません。
過信
位置と地図が実際よりも正確だと思い込んでいる場合、システムは過信していることになります。出力されるポーズの共分散は、本来あるべき値よりも小さくなります。つまり、システムは実際の位置が、自分が思っている位置からさらに離れている可能性を過小評価していることになります。
これは新しい情報を過小評価することにつながります。現在の姿勢推定を強く信じすぎると、新しい、特に相反するデータを過小評価する可能性があります。その結果、新しい状況への適応に抵抗を示すかもしれません。その結果、新たな状況への適応に抵抗するようになり、修正情報を無視するようになる可能性さえあります。
過信は、ロボットの走行速度が速すぎたり、障害物との距離を十分にとらなかったりといった危険な行動を引き起こすかもしれない。これは、衝突やロボットの立ち往生といった危険な状況を引き起こす可能性があります。
自信不足
逆に、自信のないシステムは、ポーズ推定の品質に関して過度に慎重になり、その結果、共分散が過度に大きくなります。これは、真の位置が推定位置と大きく異なる可能性を誇張していることを意味します。
これは、過度に慎重な行動の結果、効率が低下したり、走行時間が長くなったりする可能性が高いです。例えば、ロボットはとんでもなく遅いペースで移動したり、すでに知られている情報を確認するために追加のデータと処理時間が必要だと繰り返し判断したりするかもしれません。
共分散の質を理解する
したがって、システムやその内部モジュールが生成する共分散推定値の品質を分析し、理解できるようにすることが不可欠です。良い共分散は、確率を正確にモデル化するはずです。"真の "ポーズは、推定された共分散の90%信頼領域内に90%の確率で含まれるはずです。システムは非線形であるため、共分散の品質がある程度低下することは現実的です。つまり、一般的に真の確率分布はガウス分布として完全にモデル化することができないため、ガウス表現は必然的に近似となります。
この分析を実行するために、私たちは多種多様なデータセットに対するシステムのパフォーマンスを調べ、グランド・トゥルースと比較します。Kudanでは、共分散品質を測定し視覚化するためのより良い方法を探求し続け、どの変数が共分散品質に最も大きな影響を与えるかを理解しようとしています。
システムの共分散品質が理解されれば、次のステップはこの情報を使って不確かさ推定を校正することです(真の不確かさをよりよく表すために推定された共分散を調整します。)
最後に
共分散による不確実性の管理は、倉庫のようなダイナミックな環境における安全性と効率性の両方を確保し、移動ロボットの運用の成功にとって基本的なものです。共分散推定値の理解とキャリブレーションを洗練させることで、危険な過信の落とし穴と過度な注意の非効率性の間の適切なバランスを見つけることに近づき続けることができます。

