前回の技術アップデートでは、Kudan 3D-Lidar SLAM (KdLidar)※ のセンサセットアップに対する安定性と柔軟性に関するものでしたが、今回はKdLidarのLidarのセンサタイプに対する柔軟性の高さについて紹介いたします。
Lidarのタイプと3D-Lidar SLAMの性能の関係
自動運転・自律走行などの適用事例が拡大し、需要が拡大することで、従来の機械回転式のものだけでなく、様々なビーム射出・走査方式の3D-Lidarが市場に投入されています。SLAMに用いるLidarとしての適性をみるうえでは、特に次の4つの要素が重要となります(下図参照)。
1)Range(レーザー射程)
2)Spatial resolution(空間分解能)
3)Field of View (視野角:FoV)
4)Frame rate(フレームレート)
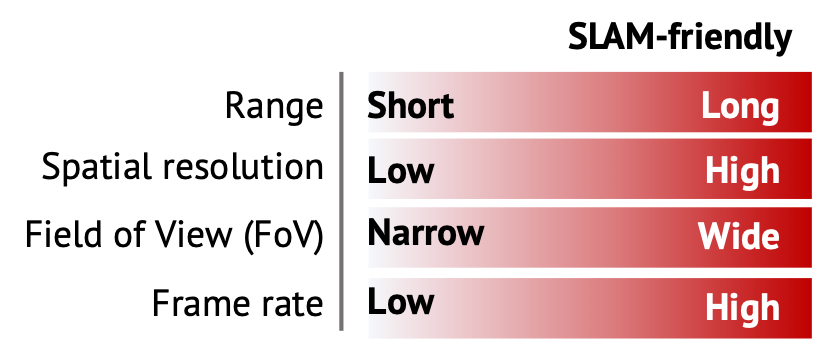
1)Range(レーザー射程): Lidarの射程は製品によっては50m未満のものもあれば、200mを超えるものもあります。射程が長ければ長いほど、周囲の様々な構造物の情報を取得できるため、SLAM用途に適しています。
2)Spatial resolution(空間分解能): これは、どれだけ密な点群を生成できるかを示す指標です。より高い分解能であれば、周辺の構造をより精緻に捉えることができ、SLAMに適した点群を生成可能です。
3)FoV(視野角): 水平方向と垂直方向、両方の視野角が重要になります。機械回転式のLidarであれば水平方向視野角は360°となり、SLAMには最も適しています。
4)Frame rate(フレームレート): Lidarが1秒間により頻繁に点群をスキャン・生成できれば、それだけ各スキャン間の点群の変化は小さくなり、より正確にセンサの動きを把握でき、SLAMに適しています。
上記は、ある人が、いくつか穴の開いた黒い布で覆われた点滅する懐中電灯を持って、暗闇の中を歩いていくことに例えることができます。暗闇で、懐中電灯の光が遠くまで届くほど(レーザー射程)、そして、より多くの穴が黒い布に空いていて光を通すほど(空間分解能)、周囲の認識を行いやすくなります。また、もちろん光が届く範囲が広いほど(FoV)、そして1秒に1回点滅するのではなく1秒に10回点滅するように頻繁に光るほど(フレームレート)、同様に周囲の認識が行いやすくなります。
しかし、SLAM適性という観点だけでみると、これらの要件を全て満たすようなLidarが理想的であるものの、そのようなLidarは非常に高価なものとなり、多くの適用事例ではコストの観点で現実的ではありません。そのような状況においては、SLAMソフトウェアの性能で、Lidarハードウェア自体のスペックを補い、適用事例に見合った自己位置推定精度・安定性を実現する必要があります。
KdLidarのLidarタイプやスペックにおける柔軟性
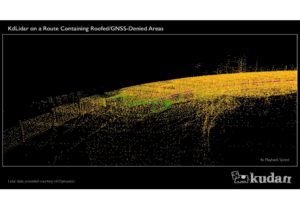
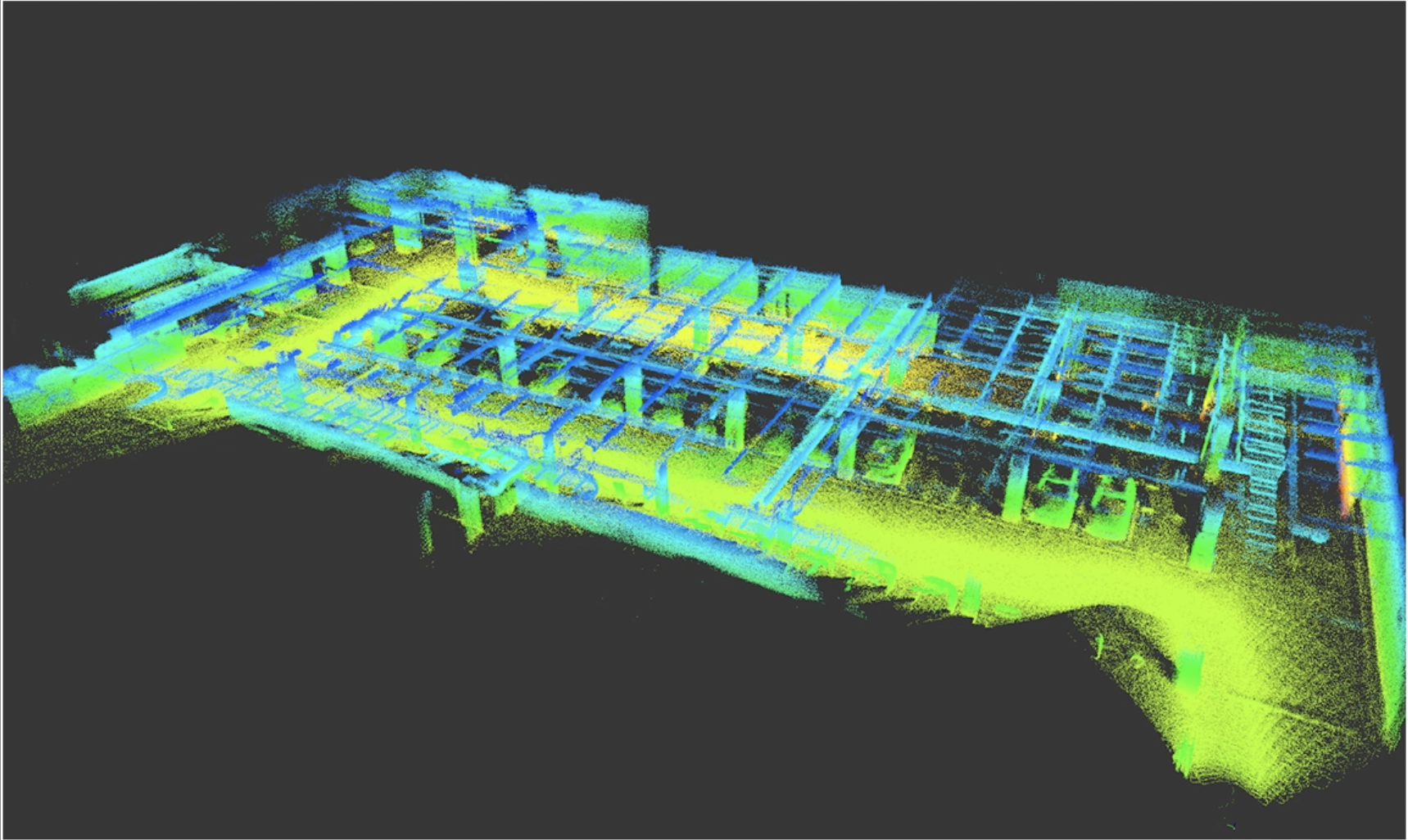
下記の動画では、Livox社のHorizonというモデルを用いて収集したデータをKdLidarに入力し、SLAMを行い自己位置推定と点群地図作成を行っています(このデータセットはLivox社ウェブサイトで入手可能です)。このLidarモデルは、他のLidarに比べても非常に低価格である一方、FoV(視野角)は 水平方向81.7°× 垂直方向25.1°となっており、視野角という観点では、SLAM用途の使用が難しいLidarといえます。この動画では、KdLidarがこの視野角の限られたLidarにおいても安定して自己位置推定を行い、Lidarを搭載した自動車の細かい動きも正確に再現している様子が分かります。また、こちらのデモは、GPSや Inertial Measurement Unit (IMU)といった他のセンサの補助なしに行っています。
Livox社のHorizonセンサを使ったKdLidarのデモ動画:
KdLidarは、それぞれのLidarハードウェアの性能を最大限活用しながら、より正確かつ安定した位置推定の提供が可能なうえ、ユースケースの要件を満たしつつ、より安価なLidarの使用を可能にします。このようなLidarタイプやスペックへの柔軟性の高さによって、より様々なロボティクスや自動運転、マッピング&サーベイなどの領域におけるKdLidarの導入が加速しています。
※:3D-Lidarセンサ情報から周辺環境マッピングと自己位置認識を同時にリアルタイムで行う技術。Lidarの普及に伴い自動運転・自律走行・マッピングといった領域での活用が進んでいる。