3D-Lidarを用いたSLAMは、様々な環境においても非常に安定した自己位置推定アプローチとして注目されています。その中でも特にその強みを発揮するのが、屋根や天井などに覆われたエリアや様々な構造物が林立している「アーバンキャニオン」と言われるエリアのような非GPS環境です。今回の技術アップデートでは、GPSが使えず位置推定が難しい環境下において、Kudan 3D-Lidar SLAM(KdLidar)※1がどのように動作するのかについて紹介いたします。
非GPS環境下での3D-Lidar SLAMがもたらす価値
多くの屋外での適用事例では、GNSSとINS(Inertial Navigation System: GNSSとIMUを組み合わせた装置)が現状の主な位置推定アプローチとして活用されています。これらは、前述のようなアーバンキャニオンや橋梁の下、屋内環境においては、正確な位置情報の出力が難しく、時間と共に誤差の大きな出力となる可能性が高いです。このような状況では、十分な精度を保つために他の位置推定アプローチを活用する必要があります。
SLAMは、これらの非GPS環境においても、固定のインフラストラクチャを必要とせず、他のセンサを統合することで解決することが可能です。3D-Lidarは、明暗や自然光に関わらずとも正確な深度情報を取得できるため、Lidar SLAMはこのような非GPS環境において非常に有効となります。自動化・自律走行化のさらなる加速と3D-Lidarの低価格化が進行することで、Lidar SLAMは、より高い投資対効果(ROI)をもたらすようになることが期待されています。
KdLidar: ループクローズなしでの屋根つきエリアでの正確な自己位置推定
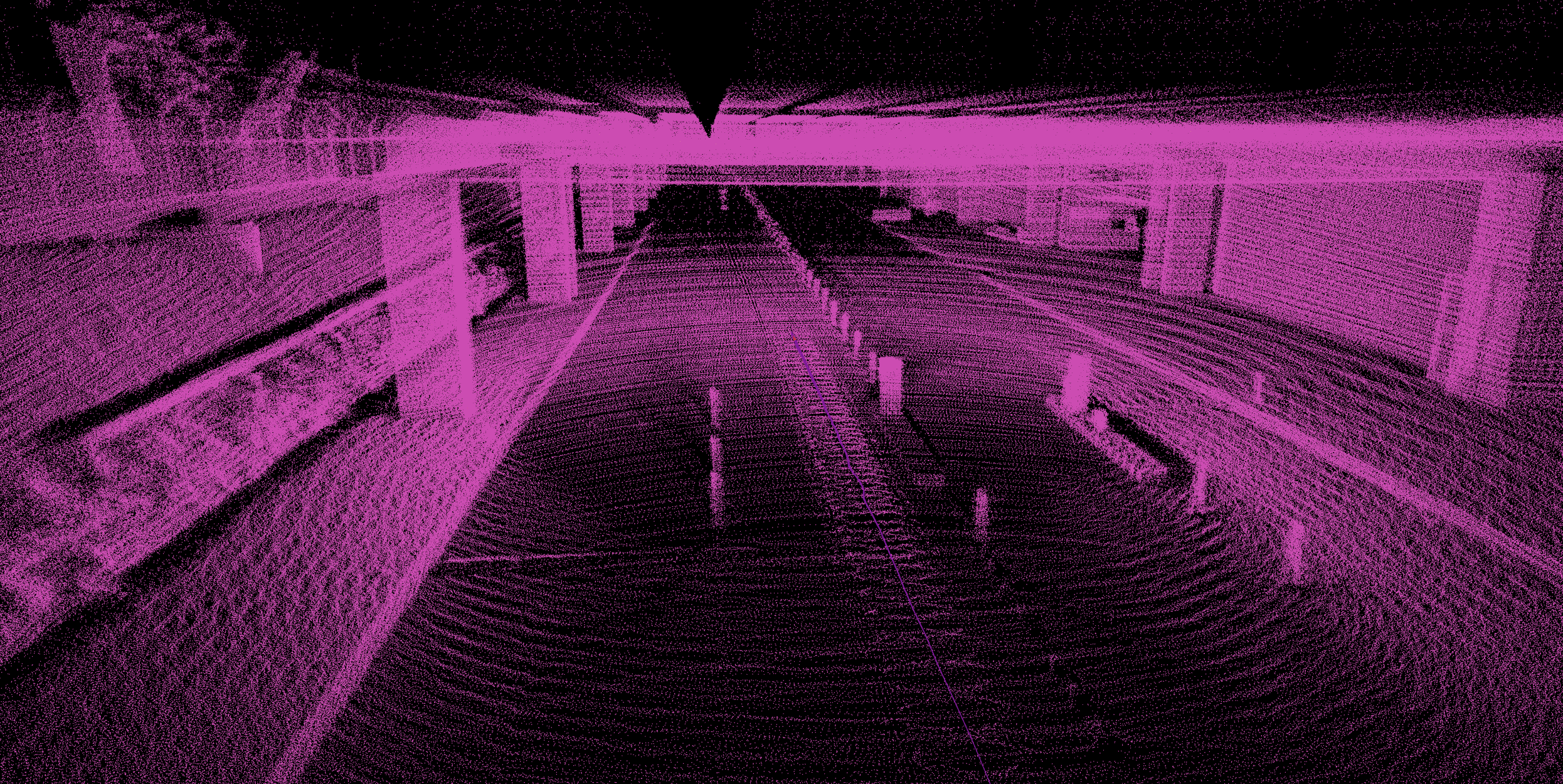
下記のデモ動画では、Kudanの3D-Lidarパートナーの1社であるOuster製のOS1-64を活用しながら、マッピングソリューションプロバイダ兼南米におけるOusterの販売代理店である Dymaxionが収集したデータを用いて、KdLidarをテストしています。約1.7km程度の幹線道路を走行し、最後の約500mは、速度減速帯を伴った非GPS環境下である屋根つきエリアを走行しています。
KdLidarは、GNSSやIMUといった他のセンサを統合することも可能ですが、今回は純粋に3D-Lidarからのデータのみを入力してKdLidarをテストしています。デモ動画が示すように、軌跡はルート全体で非常に滑らかで、屋根つきエリアでのスピードバンプによる細かい車体の動きも正確に再現しているのがわかります。
デモ動画:
ロボティクスやマッピング・サーベイ領域での適用事例で、KdLidarは付加価値を提供することのみならず、その性能はインフラストラクチャの点検領域での課題やニーズにも応えることができます。
Dymaxion S.A.S.のCEOであるGustavo Guevara氏のコメント
「南米のインフラ点検関連領域において、3D-Lidar SLAMは強い需要があります。例えば、近日開始予定のプロジェクトでは、24,000kmもの道路に対して電柱・電線の点検作業のためにマッピング技術が必要ですが、もし、3D-Lidar SLAMを活用せず、高性能INSやモバイルマッピングシステムをこれらの点検作業に用いた場合、莫大な費用がかかるでしょう。インフラ設備の老朽化で、このような大規模プロジェクトは今後更に必要になります。KudanのLidar SLAMは、我々がテストした他のLidar SLAMに比べて優れた性能を示しており期待しています。」
インフラ点検・維持管理の市場規模は非常に大きく、日本国内で年間4.5兆円にのぼり、今後さらに拡大していくとされています※2。Kudanにとっての重要領域の一つとして、この市場でのニーズに更に応えられるよう開発を進めてまいります。
※1 3D-Lidarセンサ情報から周辺環境マッピングと自己位置認識を同時にリアルタイムで行う技術。Lidarの普及に伴い自動運転・自律走行・マッピングといった領域での活用が進んでいる。
※2 出展:国土交通省所管分野における社会資本の将来の維持管理・更新費の推計(国土交通省の参考資料より)
https://www5.cao.go.jp/keizai-shimon/kaigi/special/reform/wg6/181130/pdf/sankou.pdf