実用上レイテンシーをほぼ無視できるゼロラグ・トラッキング(Zerolag tracking)はKudanのGrandSLAMの重要な特徴です。
このポストではその概要についてご紹介しています。
What is Zerolag tracking
●Generally, automotive-grade LiDARs work at 5 to 20Hz. For automotive use cases, sensors can travel 1 to 5m over each scanning
●This 1 to 5m can cause many issues, especially in some cases which require highly accurate localisation and mapping
●Using Kudan’s GrandSLAM, the system can correct and update the position of the sensor with the frequency of fused IMU which can generally run-up to the order of tens kHz, and compress the latency of position recognition less than ten micro sec
●This enables system output with practically zero lag for vehicle localisation and minimizes the real-time tracking accuracy into less than several cms
Benefits of Zerolag tracking
●Vehicle/ robot localisation can work even the sensors move with high speed and quick turns. This can contribute to highly accurate and real-time localisation for automotive, drones, aircrafts
●The algorithm can save processing consumption with keeping the output frequency and latency, which enables the algorithms working on lower graded processors and/ or providing more processing power for other algorithms (e.g., object recognition, navigation)
Example of Zerolag tracking
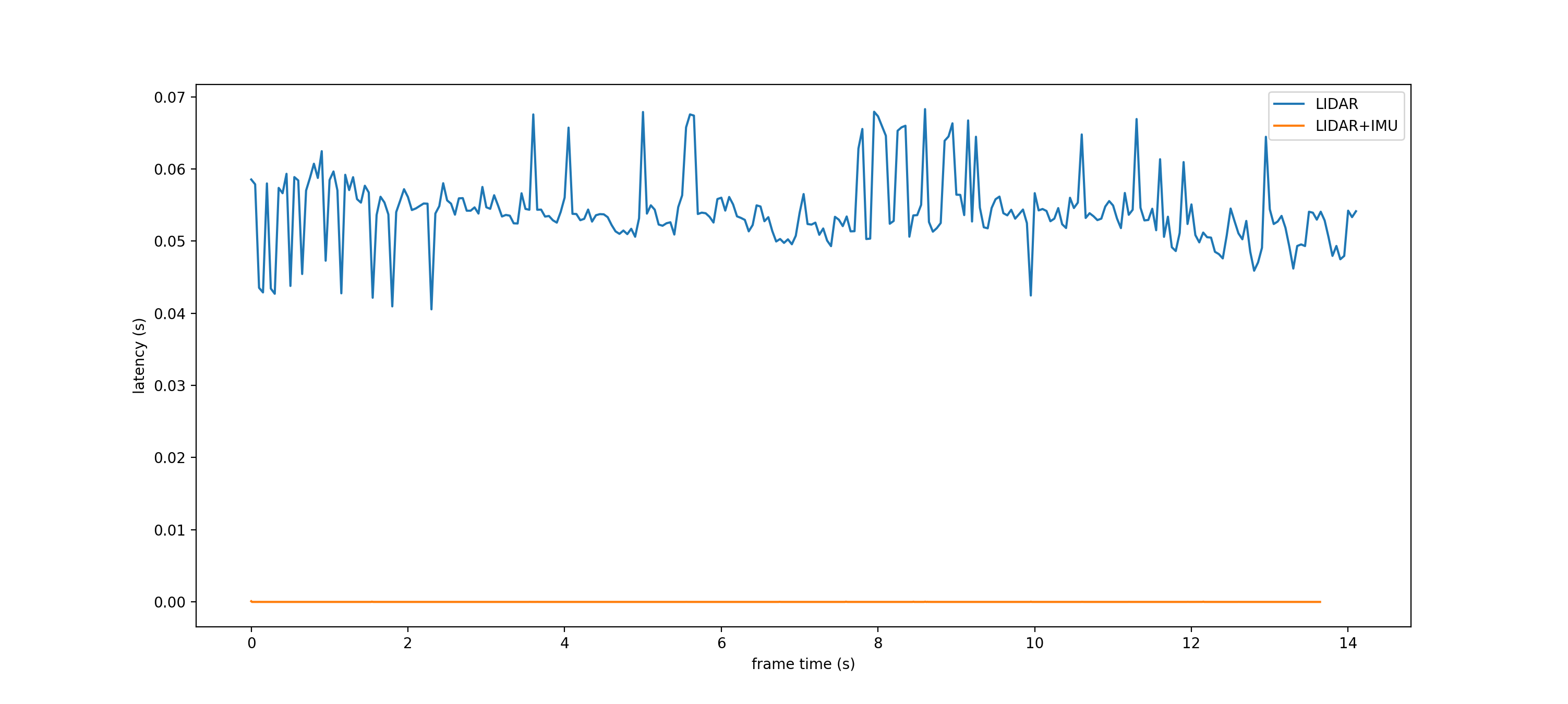
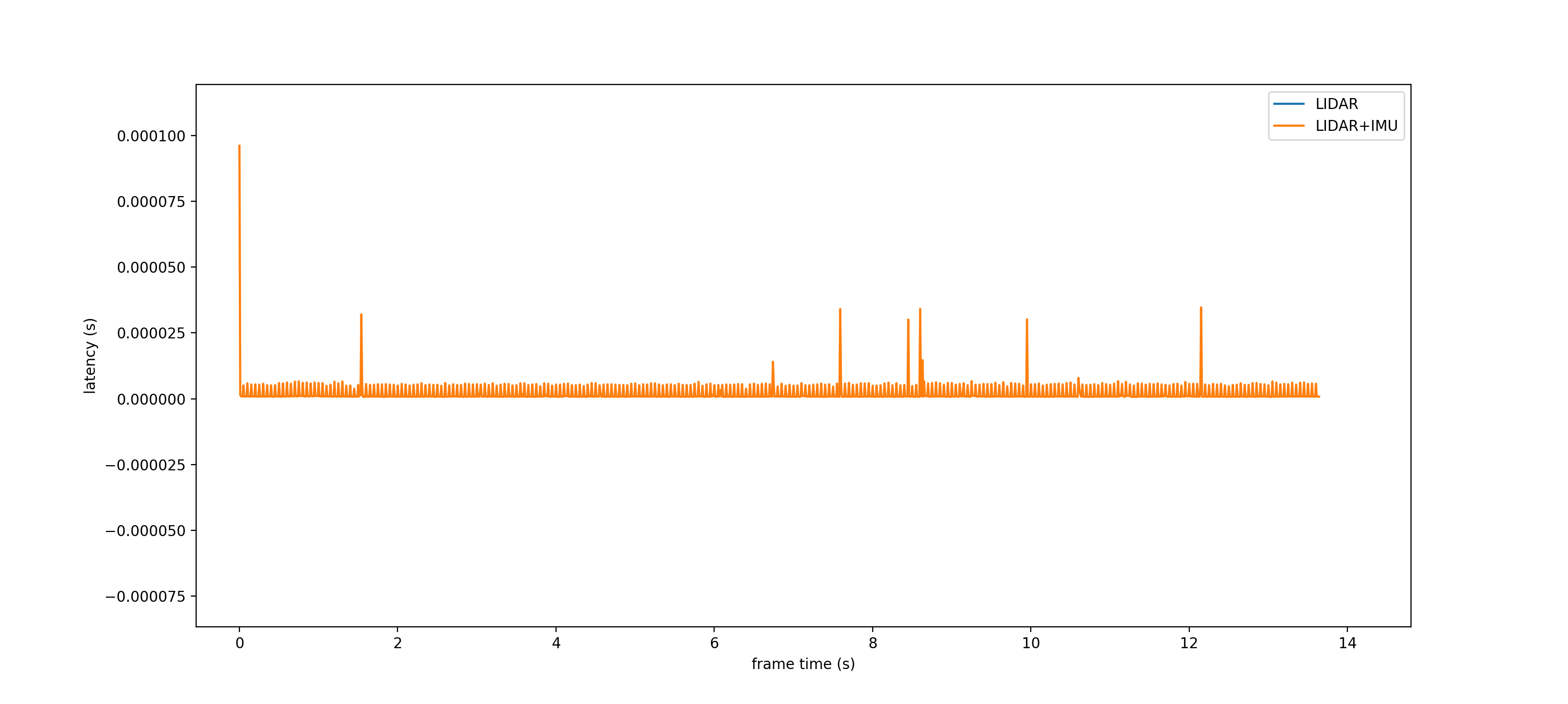
●We have run GrandSLAM on general automotive-grade LiDAR data and compared the results with and without IMU synchronisation
●The result without IMU showed a latency of 50 to 60 milliseconds, while the result with IMU showed a latency of less than 10 microseconds, confirming that it is possible to output a position 5000 times faster and it's almost ignorable for any practical use cases