Scalability matters for large-scale applications in autonomous vehicles and robotics
3D-Lidar SLAM can provide the position of a vehicle or a robot very accurately and robustly at any given moment, even under GNSS-denied environments, and has been a component in many autonomous driving and robotics projects. However, reliable high accuracy and robustness are minimum requirements when deploying the technology in some large-scale applications such as commercial autonomous vehicles and outdoor delivery robots. Working with one of its global automotive OEMs for their autonomous driving project, we identified some pain points for the users. Kudan has recently developed two features, Map Merging and Map Streaming, to increase scalability and efficiency. Let’s take a look at what Map Merging is and how it works.
Map Merging: Bringing down the cost to create and maintain large-scale maps for autonomous vehicles and robots
In many autonomous driving and robotics applications, we need to create a map of the area in advance. Then vehicles and robots can operate autonomously using localization on that map combined with other information such as lane information, obstacle information. When it comes to large-scale applications, creating a map is not easy work and potentially requires many resources to cover a large area. Map merging is the function of merging several maps into a single large map using GPS data and point cloud data of each map.
Here is the demo video: Kudan Lidar SLAM: Map merging function
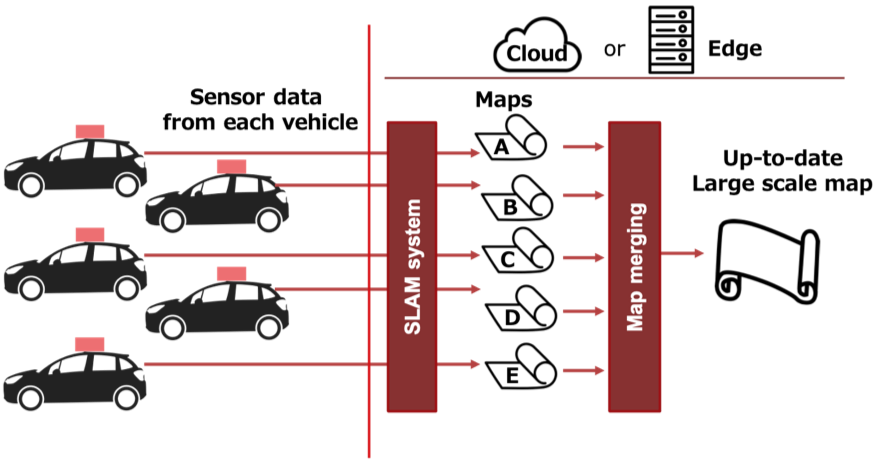
This new feature enables de-centralizing map-making work so that solution providers don't have to collect all the data all at once to create a large map. Moreover, this function also opens up the "collaborative mapping" concept.
Collaborative mapping is the idea of creating a large-scale map using not only vehicles and robots dedicated for map collection but also those for regular users. The user's vehicles consume the map, but at the same time, it can collect the sensor data and upload it to a central server (regardless of edge or cloud). Then the system can run KdLidar for each sensor data to create small maps and "map-merge" them into a large map. Also, this map is created with recently collected data, so the map is up-to-date. Collaborative mapping enables significantly lower map maintenance costs.
While we are working with an auto OEM for its city-scale autonomous driving project, they are using this function to create a map of a city in Europe. We are planning on pushing this out to other projects requiring large scale-maps and multi-session mapping.
About Kudan Inc.
Kudan (Tokyo Stock Exchange securities code: 4425) is a Deep Tech research and development company specializing in algorithms to enable artificial perception (AP). As a complement to artificial intelligence (AI), AP functions allow machines to develop autonomy. Currently, Kudan is using its high-level technical innovation to explore business areas based on its milestone models established for Deep Tech, which provide a wide-ranging impact on several major industrial fields. For more information, please refer to Kudan’s website at http://www.kudan.io/.
■Company Details
Name: Kudan Inc.
Securities Code: 4425
Representative: CEO Daiu Ko

