Offerings
Solving the toughest challenges in Localisation (position and pose estimation) and Mapping (3D point cloud generation) for autonomous robots, vehicles, drones, and digital twins. We provide diverse technology packages and expert support to ensure the success of customer.
Packages
Applications
Position & Pose Tracking
for autonomous mobile robots,
vehicles, RTLS
3D Reality Capture
for digital twin and and Smart Cities
Core software
engine
Software &
hardware package
End-to-end
solution
Coming soon
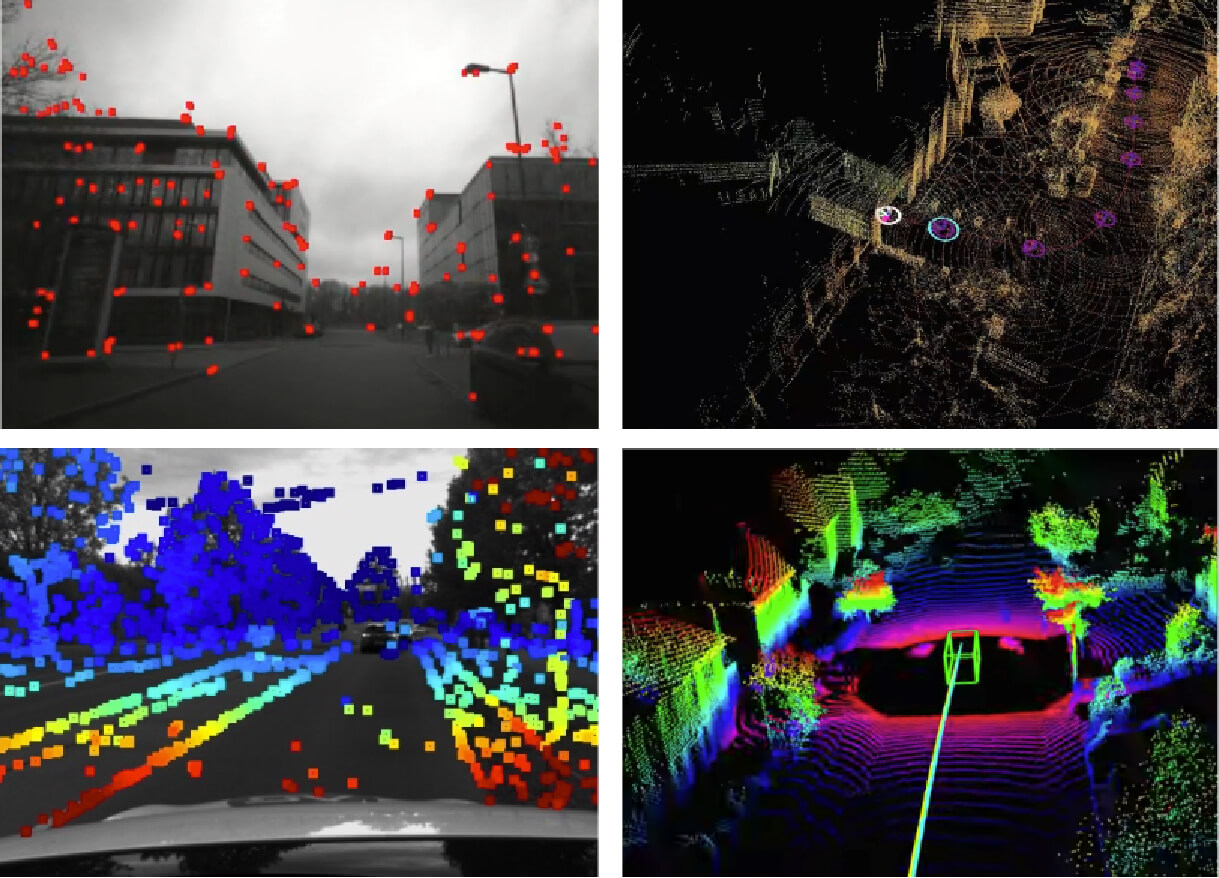
Position & Pose Tracking
Core Software Engine: KdRobot
KdRobot provides robust and accurate 6DoF position tracking against various environments
- Proprietary SLAM algorithm with Visual (Camera) and/or 3D-LiDAR
- Flexible sensor fusion with other sensors (e.g. IMU, GNSS, Odometry and Markers)
- Working in all situations (e.g. indoor/outdoor, even/uneven ground, daytime/nighttime, dynamic objects and scenery changes)
- HW accelerated with low computing power
- Offered as C++ library or ROS/ROS2 wrapper
- Multi Sensor Fusion
- Multi Tracking Mode
- Hand-crafted and
Deep-learned Feature - Hardware Accelerated
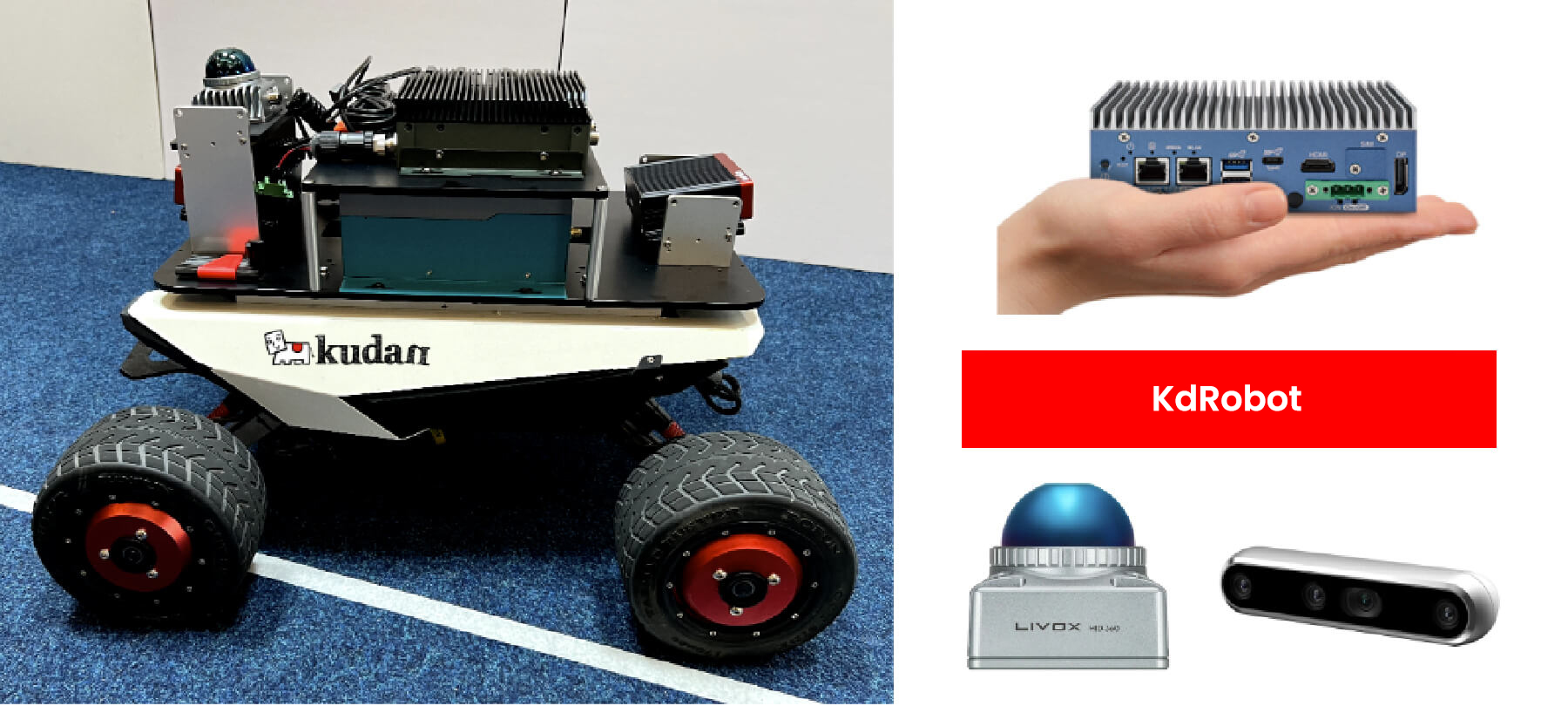
SW/HW Package: Mobile Robot Dev Kit (MRDK)
Reference kit to accelerate customer product development lead-time:
- Bundling KdRobot with hardware components (sensors, compute)
- Flexible sensor setup for meeting various use case requirements
- Easy integration with ROS-compliant mobile robot base
- Enables fast functional and performance evaluation
- Capable to support full navigation system in addition to SLAM
3D Reality Capture
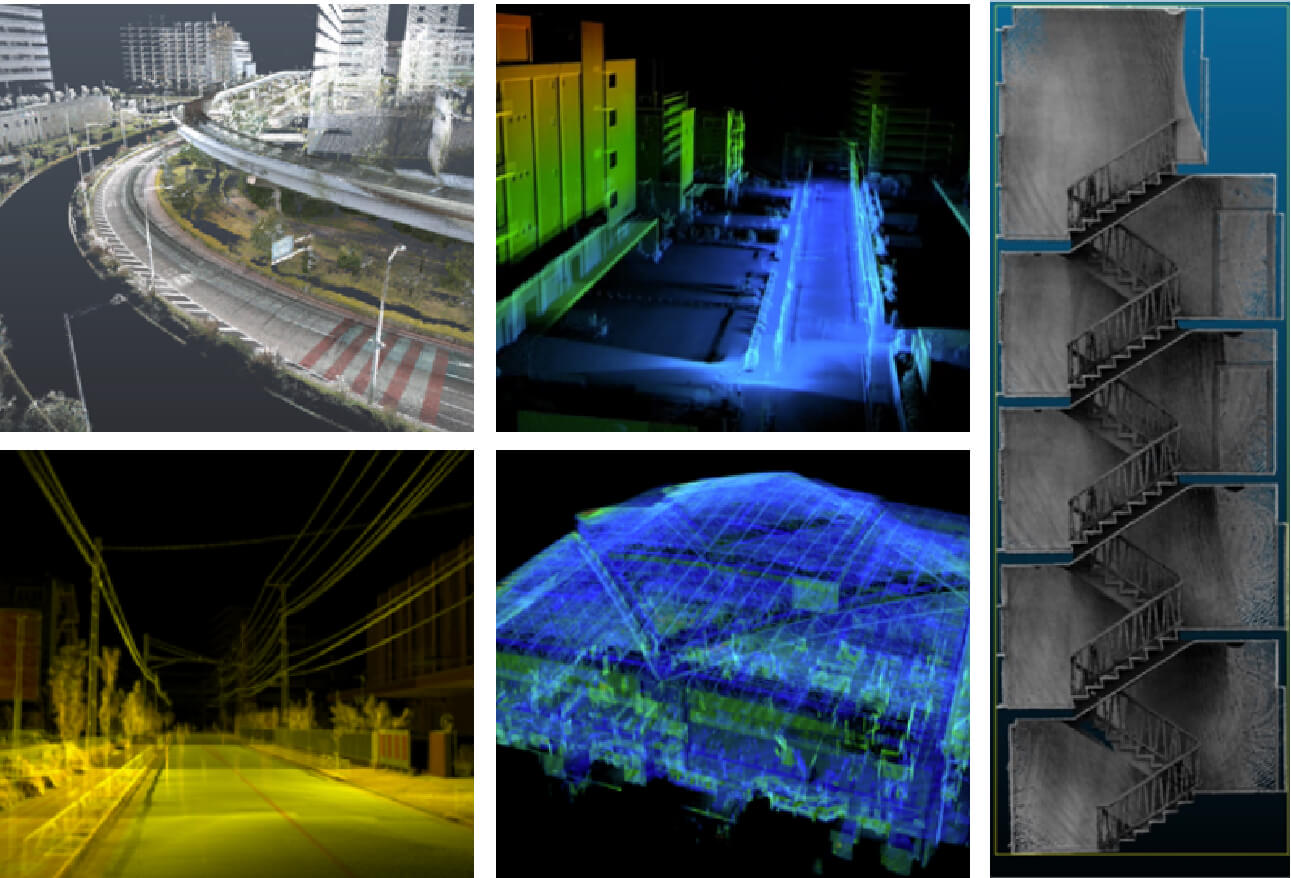
Core Software Engine: KdMapping
KdMapping generates high accuracy, crisp point cloud for digitizing workflows of different verticals
- Proprietary 3D-LiDAR SLAM algorithm fused with cameras, IMU, GNSS
- Flexible to sensor setup meeting various use cases
- Working in all situations (e.g. indoor/outdoor, scalable for city-scale mapping, stable for dynamic objects)
- HW accelerated with low computing power
- Offered as C++ library
- Multi Sensor Fusion
- Sensor agnostic
- Hardware
Accelerated - Scalable
map-handling/
merge/ update
SW/HW Package: Mobile Mapping Dev Kit (MMDK)
Reference kit to accelerate customer product development lead-time:
- Bundling KdMapping with hardware components (sensors, compute)
- Enables fast functional and performance evaluation
- User friendly interface for mapping operations
- Wide package variation covering handheld, backpack, and vehicle setup
- Capable to support customised integration with 3D point cloud based solutions

SW/HW Package: XGRIDS Lixel Series
Real-time field data acquisition enables customers to improve their business processes and acquire data in a shorter time.
- Real-time results can be checked, avoiding rework
- All-in-one integrated design for easy portability
- Clean and clear point cloud data acquisition
- Adaptable to multiple environments (indoor/outdoor, dustproof, waterproof)
- High-quality, photo-realistic color point clouds

End-to-End Solution: Digital Asset Management Solution
Registering physical assets, improve O&M, easy and revolutional digitization:
- For manufacturing, Utilities, IFMs, and O&M operations
- Integrating 3D reality capture technologies with tools and applications ready for the end-user operations
- Working through fast asset mapping, photo-real digital twin generation and semantic processing, building multi-format asset database scalable and TPM capable
- 30% productivity increase, 25% less travel time, 30% less search time, company-wide knowledge sharing for innovations and efficiencies
-
Fast asset
mapping
-
Photo-real digital
twin asset -
Build/ extend
asset database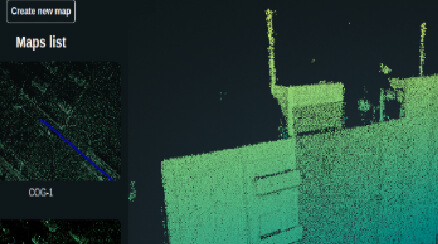
-
Database
Optimisation