最近の太陽活動によるGPSなど衛星測位システムの位置精度低下とその対抗策

EUSPA(European Union Agency for the Space Programme)によると、全球衛星測位システム(Global Navigation Satellite System、GNSS)とは宇宙から信号を送り、GNSS受信機に位置とタイミングのデータを送信する衛星群のことを指します。受信機を備えた電子機器は、このデータを使って地表での正確な位置を特定することができます。GNSSは衛星測位システムの総称で、日本でよく使われる「GPS」という名称はアメリカが開発したシステムで、GNSSの1つです。
GNSSは、受信機の位置をおよそ数メートルの精度で測定することが可能です。この技術をさらに改良した代表的なものにRTK-GNSS(リアルタイム・キネマティック)があり、位置精度を約1~4cm程度にまで高めることができます。
RTK-GNSSは周囲に障害物があると容易に精度が悪化するため、通常他の位置測位システムと組み合わせて用いますが、自律走行採掘トラック、農業用ロボットなどの一部の屋外向け自律走行車は、周囲に障害物のない非常に開けた場所での運用のためGNSS、特にRTK-GNSSのみを使用しているケースがあります。
GNSSに何が起きたのか?
GNSSは、上記のような非常に開けた場所での自律走行車の正確な位置測定ができるにもかかわらず、最近、GNSSやRTK-GNSSを活用している企業から相談を受けることが増えてきています。彼らはRTK-GNSSを用いた位置測位システムを過去用いて運用してきたが、ここ最近その精度が低下している、というものです。これらの企業では、GNSS信号を安定的に利用できない場合、車両は運転を停止し、信号が回復するまで待たなければならず、生産性に多大な損失を与えてしまいます。
企業は、もはやGNSSだけを測位システムとして信頼することができなくなっているのです。
なぜ、このようなことが起こっているのでしょうか。
なぜGNSSは信頼できなくなっているのか?
GNSS信号の信頼性低下は、過去に起きた太陽活動の活発化に関連していると考えられます。なぜそれが起こっているのか、詳しく説明していきます。
太陽では、他の星と同じように、非常に大きな爆発が定期的に起きているなかで、過去数ヶ月間、太陽活動が絶え間なく活発化していることが観測されており、今後数年間はさらに増加すると予想されています。
EUSPAによると、太陽磁場の周期的な変動は約11年ごとに発生すると考えられており、最新の太陽活動周期である「サイクル25」は、2019年12月に始まり、2023年から2026年にかけてその影響が最大になると予想されています。
宇宙の天気予報センターであるSpace Weather Prediction Centerが発表した以下のグラフは、太陽周期と予想される時間軸をより詳しく示しています。
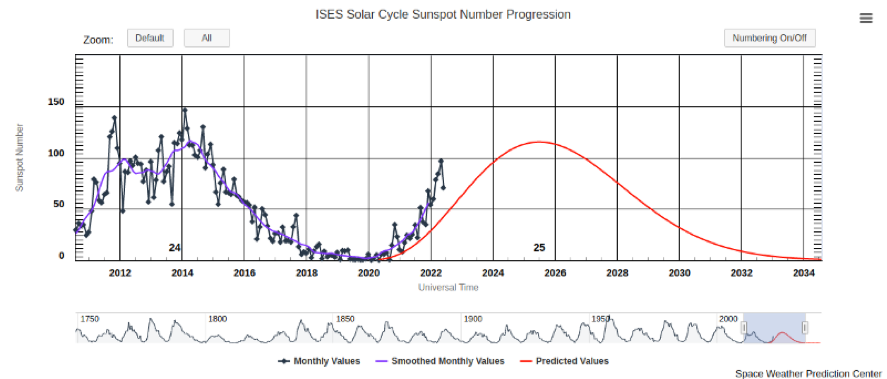
図2:太陽周期の進行状況
太陽活動が数年ごとにピークを迎えることが分かりましたが、GNSSなどの通信システムにはどのような影響があるのでしょうか?
GNSS受信機は地球を周回する衛星から発せられる信号によって位置を特定しています。これらの信号は地球まで約20,000kmの距離を移動しますが、ここではほとんど問題は発生しません。信号の信頼性低下や遅れは、地球の大気圏内、特に電離層(イオン圏)内での信号の屈折や回折によって起こるのです。荷電粒子と呼ばれる大気中に存在する電気を帯びた粒子が影響を及ぼします。
GNSS受信機は、荷電粒子が均一に分布しているというような推測をもとに衛星信号への荷電粒子の影響を考慮するのが一般的です。しかし、太陽活動の活発化は、電離層の電子密度に変動をもたらし、受信機が想定するのとは異なる屈折や回折を生じさせます。
この現象はシンチレーションと呼ばれています。不規則な影響のため、標準的なGNSS受信機では、このような強いシンチレーション現象に対応できません。軽度のシンチレーションは数メートルのズレをもたらし、重度のシンチレーションは更に大きな誤差(サイクルスリップ)を引き起こし、最悪の場合、完全に信号が失われることもあります。
我々が受ける相談も、まさにこの課題でした。このような課題は、今後数年は繰り返されると推測されており、自律走行ロボットなどが用いる測位システムは、GNSSの精度低下に対応できるようなロバスト性の高いものでなければなりません。
では、太陽活動がGNSSに与える影響を軽減するにはどうしたらよいのでしょうか。
SLAMはどのように役立てるか?
GNSS信号の信頼性低下を克服するための最初の選択肢としては、上記の課題に対してより堅牢で先進的なGNSSシステム[1]を探すことです。高度な受信機を持つシステムは、標準的な受信機では困難な条件下でも信号の追跡を続けることができます。
しかし、根本的な対策を講じるのであれば、測位システムにお互いに依存しない複数のアプローチを導入する必要があります。私たちは、GNSS信号が利用できない場合の仕組みとしても機能する3D SLAMをGNSSと組み合わせて使用することを推奨しています[2]。
3D SLAMは、カメラ画像や3D-Lidarの点群データがあれば、屋外環境でも正確に機能します。
採掘場、農地、駐車場などの広く開放的な空間では、3D-Lidar SLAMよりもVisual SLAMの方が有効です。3D-Lidar SLAMでは、センサの周りにある物体を一定以上検出する必要がありますが、上記のような広い空間では検出できない可能性があります。一方、Visual SLAMは、そのような場所でも視覚的な特徴を使ってトラッキングを続けることができます。しかし、50m~100mの範囲に物体がある場合や夜間においては、3D-Lidar SLAMの方が精度とロバスト性に優れています。
究極のソリューションは、カメラと3D-LidarをGNSSやその他のセンサと融合させることです。長期的には、このソリューションは、様々なユースケースに対して信頼性が高く、堅牢で、正確な測位システムの確保に役立ちます。
既存のGNSSベースの測位システムでパフォーマンスに問題がある場合、今回ご紹介したような理由が考えられますので、ぜひKudanにご連絡ください。このような障害による運用停止を回避し、お客様の適用事例に必要な精度と性能を取り戻すべく、カスタマイズされたSLAMベースのソリューションをご提案させていただきます。
参考文献
[1] Petovello, Mark & O’Driscoll, Cillian & Lachapelle, Gérard & Borio, Daniele & Murtaza, Hasan. (2008). Architecture and Benefits of an Advanced GNSS Software Receiver. Positioning. 1. 66–78. 10.5081/jgps.7.2.156. [PDF]
[2] Gong, Zheng & Ying, Rendong & Fei, Wen & Qian, Jiuchao & Liu, Peilin. (2019). Tightly Coupled Integration of GNSS and Vision SLAM Using 10-DoF Optimization on Manifold. IEEE Sensors Journal. PP. 1–1. 10.1109/JSEN.2019.2935387. [PDF]
■お問い合わせ先はこちら

