この記事とデモ動画では、倉庫におけるフォークリフトの位置把握にKdVisualを使用した最新の事例を共有します。フォークリフトのためのリアルタイムロケーションシステム(継続的な位置把握システム:RTLS)は、デジタルトランスフォーメーションの一環として、工場や倉庫における生産性と安全性の向上のために、製造業を初め、様々な業種でますます注目を集めています。
正確で継続的なフォークリフトの位置把握は、次のような価値を提供します。
- 衝突回避機能による安全性向上
- 運搬経路の最適化と誘導性能の向上
- リアルタイムでのタスクの優先順位付けの最適化
- オペレーターの作業効率の可視化
- 事故の原因究明や分析への利用
- 在庫管理の最適化
企業は、これを達成するためにさまざまなRTLSの手法を導入しています。本記事ではそれらを比較するわけではありませんが、SLAMベースの手法は主要なアプローチの一つです。ただし、一連の課題が、SLAMベースのRTLSを実際に大規模に展開することを妨げています。典型的な課題は以下の通りです:
- 環境が時間とともに変化すると、位置把握の精度が低下、ないし把握が困難
- フォークリフトが事前に作成されたマップの外に出ると、位置を把握するのが困難
- 高い計算能力と大きなメモリ容量がハードウェアに求められ、コストが非常に高価となる傾向
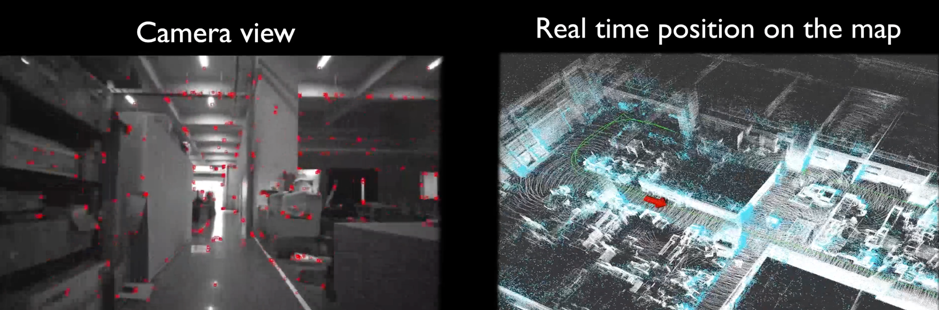
KdVisualは、これらの課題を克服することが可能です。このデモ動画※では、KdVisualが実際の倉庫環境で最初の2つの課題を克服していることを示しています。
- マップが作成された時はシャッターが閉じていましたが、フォークリフトがドアを通過するときには開いていました。これは非常に大きな風景・見た目の変化であり、典型的なビジュアルSLAM手法では問題が発生しますが、KdVisualでは容易に位置把握を継続しています。
- フォークリフトはマップの外(建物の外部や倉庫内のマッピングされていない領域)に出ています。私たちのシステムは、フォークリフトがマップの内外を自由に移動できるようにし、常に位置の精度を維持します。
※デモ動画
コストに関しては、当社のシステムは高度なGPUやハイエンドのカメラを必要としません。数万円程度のIntel RealsenseとIntel CPUで動作し、また、KdVisualはクラウド実装にも対応しており、クラウドと組み合わせて使用する場合、ハードウェアコストをさらに節約することができます。
RTLSソリューション向けの安定した位置把握システムをお探しの場合、是非お問い合わせください。もちろんAMR (自律型移動ロボット) にも適用可能ですので、そちらへの対応に興味がある企業様もご連絡お待ちしております。
■お問い合わせ先はこちら
