Kudan株式会社(本社:東京都渋谷区、代表取締役CEO:項 大雨、以下Kudan)は、革新的な製品を対象としたアワード『embedded award 2021』のスタートアップ部門で、Kudan Visual SLAM(KdVisual)が最優秀賞を受賞したことに関連した特集記事第2弾として、当社の子会社であるKudan USA LLC(以下、Kudan USA)のCEO 村井太郎のインタビュー記事がMarkt&Technik誌の英語ウェブ版にて公開され、今週後半にドイツ語ウェブ版とプリント版でも公開されますことをお知らせいたします。Artisenseを含めたKudanグループのそれぞれのプロダクトの注力領域や差別化要因などについてまとまっております。
なお、記事は全文英語のため、ウェブ版の和訳をこちらにて公開いたします。
オリジナルのインタビュー記事(英語):
Kudan awarded for its SLAM technology »Eyes to the all machines - that's our goal«
『embedded award 2021』スタートアップ部門の最優秀賞受賞に関する詳細:
Kudan Visual SLAM、embedded world 2021 DIGITALにてembedded award 2021スタートアップ部門の最優秀賞を受賞!
第1弾のインタビュー記事(和訳版)はこちら:
『embedded award 2021』最優秀賞受賞に関するインタビュー記事(第1弾)が掲載されました
≪Kudan USA CEO 村井のインタビュー記事第2弾≫
Kudan株式会社(以下、Kudan)は2014年に設立され、英国のブリストルにR&Dの拠点を有しています。Kudanは、SLAM(Simultaneous Localization and Mapping)と呼ばれるコンピュータビジョン技術のソフトウェアを提供しており、そのSLAMという技術を用いることで、カメラやLidarなどのセンサによって、機械やデバイスが、どこにいるのか、どのように動いているのか、周囲がどうなっているのかを理解させることが可能です。現在、グループ会社であるArtisense社も含め、ヨーロッパ(英国のブリストルとドイツのミュンヘン)に2つのR&Dセンターがあり、30人以上のSLAMエンジニアが在籍しているほか、日本と米国にも事業拠点を構えています。SLAMを専門とするエンジニアの数においては、Kudanは、世界最大の独立系のSLAMソフトウェアプロバイダーです。また、東京証券取引所に上場しています。
― Kudanは、今年のembedded awardのスタートアップ部門で最優秀賞を受賞しました。この名誉ある賞が日本のスタートアップ企業に与えられたのは初めてのことです。 今回の受賞は、Kudanにとってどのような意味がありますか?また、村井さん個人にとってはいかがでしょうか?
Kudanの革新性と技術がついに世界の舞台で認められたことは非常に心強いものでしたし、組み込み系の市場において、KudanのSLAMソフトウェアが成熟し、リーダーシップを発揮していることが明確に示されたと感じています。Kudanは、2014年からSLAMソフトウエアを開発しており、今回の受賞については、高性能な商用SLAMソフトウェアに対する市場の需要が高まっているという期待の表れとも言えるでしょう。また、日本のスタートアップ企業として初めてこの名誉ある賞を受賞できたことも大変誇りに思います。
個人的には、市場にはまだ多くの成長の機会があると考えており、だからこそ、ますます厳しくなる市場の要求に応えるためにも、Kudanの技術力を磨き続ける必要があります。今回の受賞は、Kudanのこれまでの功績を称えるだけでなく、特に、ロボット、自動運転、AR/VR、マッピングなどのターゲットとなる適用領域において、SLAM技術やKudanという企業の認知度を高めるきっかけになると思います。
― Kudanは、Kudan Visual SLAM(KdVisual)だけでなく、他のSLAMソフトウェア製品も開発されています。提供しているプロダクトやそれらを支える技術について簡単にご説明いただけますか。 また、そのソリューションの主な用途は何でしょうか?
Kudanは、グループ会社であるArtisenseとともに、Kudan GrandSLAMを提供しており、それには、KdVisualやKudan 3D-Lidar SLAM(KdLidar)、そしてArtisense社によるVisual Inertial Navigation System(VINS)の3種類のSLAMソフトウェアが含まれています(図1)。
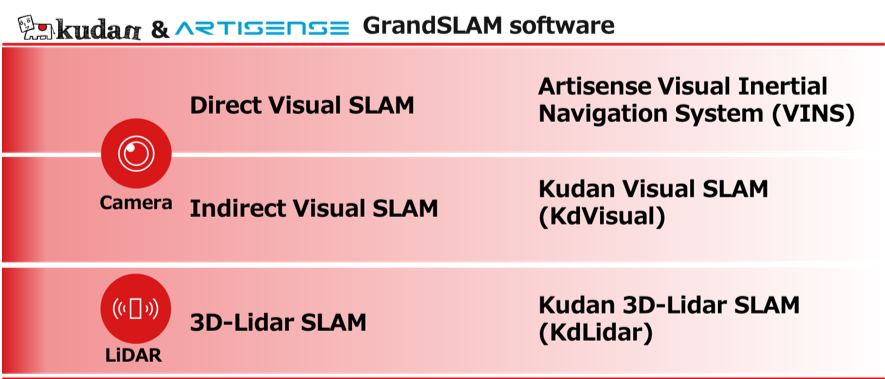
図1:Kudanグループの提供するプロダクトの概要
KdVisualとVINSは、カメラを主なセンサとして使用しており、Indirect Visual SLAMとDirect Visual SLAMというVisual SLAMの幅広い領域をカバーしています。これらの異なる手法は、それぞれの使用環境やユースケースに適した強みや性能を持っており、Kudanは、それらの手法を生かしながら、クライアント企業に最適なソリューションを提供することができます。KdVisualは、クライアント企業やパートナー企業が独自の自己位置推定機能を構築するためのAPIライブラリです。一方、VINSは、Direct Visual SLAMソフトウェアに加え、カメラ、慣性計測ユニット(IMU)、GNSSなどのハードウェア及びコンピューティングボックスを組み合わせたパッケージ製品です。
3D Lidar(光による検知と測距)は、自動運転、ロボット、ドローン、マッピングなどのSLAM関連の適用領域でますます人気が高まっています。3D Lidarを用いたSLAM技術は、Kudanの研究開発投資としてVisual SLAMに次ぐものとして非常に理にかなったものでした。KdVisualと同様に、KdLidarは、クライアント企業のソリューションに統合可能なAPIライブラリを提供しています。
これらのSLAMソフトウェアソリューションは、IMU、GNSS、ホイールオドメトリなどの他のセンサデータと融合させることにより、パフォーマンスのさらなる向上が期待できます。
なお、これら3種類のSLAMソフトウェアは、それぞれ異なる適用領域や環境に応じた強みを持っています(図2)。
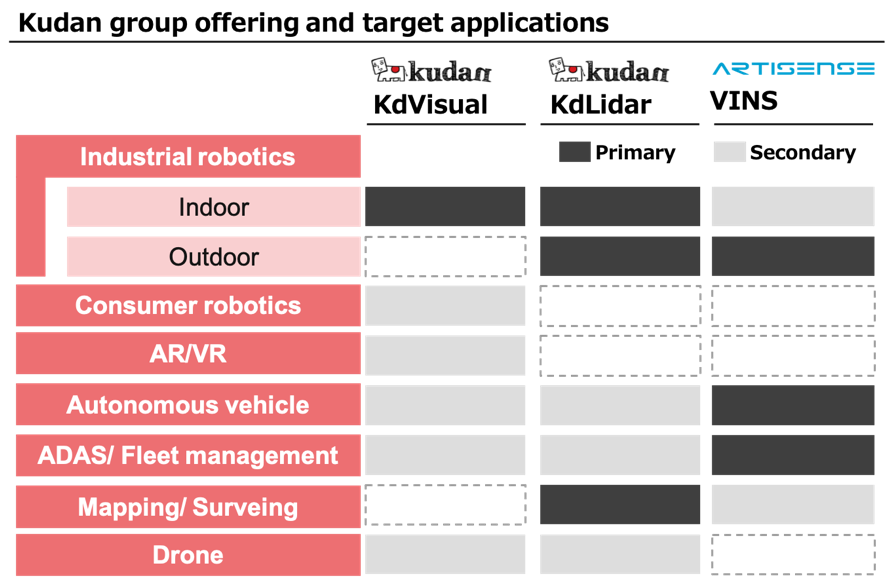
図2:Kudanグループの提供するプロダクトがターゲットとする適用領域の例
KdVisualが主にターゲットとする適用領域は、AMR(自律走行ロボット)やAGV(無人搬送車)などの屋内向けの産業用ロボットで、それに続き、消費者向けロボットやAR/VRなどが挙げられます。また、Kudanは現在、ADAS(先進運転支援システム)やドローンのプロジェクトにも積極的に取り組んでいます。
KdLidarは、自動運転だけでなく、産業用ロボットにも注力しており、GNSSとIMUを効果的に融合させることができることから、屋内だけでなく屋外の環境にも対応可能です。また、KdLidarは、施設のメンテナンスやインフラの点検など、センサの位置を正確に把握しながら正確な地図を作成する必要があるマッピングや測量などの領域にも適しています。
ArtisenseのVINSは、自動車分野におけるADASと自律走行車の両方のニーズに対応しており、バスやトラックなどの車両位置情報など、自動運転にとどまらない適用領域も含まれています。また、最近では、配達ロボットなどの屋外ロボットの領域において、風景の変化に左右されない堅牢で正確な自己位置推定が求められています。 VINSは、その性能とコスト競争力から、この市場に最適であると自負しています。
― これら3つの製品は、それぞれ異なる技術を使用しており、対象となる適用領域も異なるとのことですが、それぞれの製品の主な利点は何でしょうか?
効率的な市場カバレッジを実現し、エンジニアリングの効果を最大化するために、それぞれを差別化しています。
1. KdVisual:主な利点としては、特にROS(ロボットオペレーティングシステム:ロボット開発において非常に普及しているプラットフォーム)において、速度と精度の絶妙なバランス、堅牢性、統合のしやすさなどが挙げられます。SLAMは一般的に、処理負荷の高い技術であることからコンピューティングやメモリに制約のあるシステム環境下で有効に活用することは非常に困難です。しかし、KdVisualにおいては、クライアント企業は、より軽い処理装置(最も人気のあるオープンソースのソフトウェアのORM-SLAM2の2〜10倍の速度)を使用することができ、そのうえ、スマートフォンデバイス上でも動作できます。また、産業用のロボット領域における一般的な運用上の要件である地図に対する1cm未満の繰り返しの相対的な位置精度を実現しつつ、既存の地図上でのロボットの自己位置測定においても、他社のSLAM技術よりも(10〜20倍程度)速く測定可能です。
2D-Lidarを使用するロボットでも、KdVisualは、カメラとKudanのソフトウェアを単に追加するだけで、ロボットが自己位置を見失う、という重要なペインポイントを効果的に解決することができます。ROSベースのロボットの場合、数週間や数ヶ月単位ではなく、数日のオーダーで、このような統合は可能です。
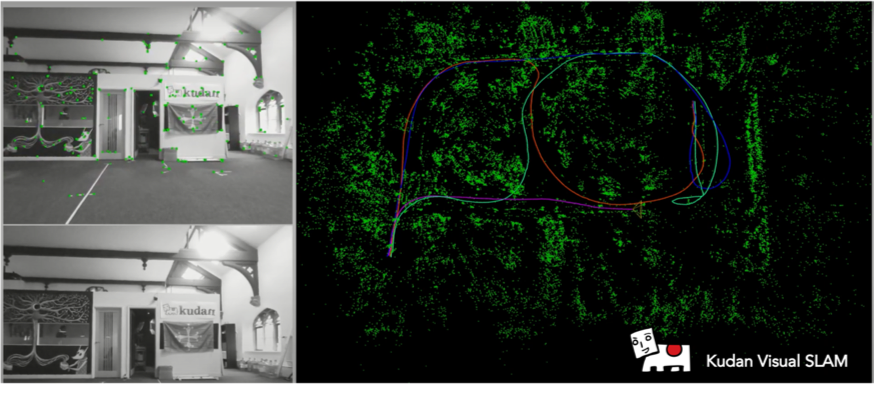
図3:カメラの加工画像とKdVisualで作成した点群地図
2. VINS:主な利点としては、風景の変化に対応できる堅牢性と非GPS環境(トンネルや都市部のビルが密集したエリアなど)での精度の高さであり、そのうえ1万ドル以上するハイエンドの慣性航法システム(INS)などの代替製品と比べると、ハードウェアコストを大幅に削減できる点です。自律移動型ロボットは、通常、事前に収集・作成された点群地図を使用しており、その地図を活用しながら、いつでも自分の位置を見つけ出すことができます。しかし、人や物、照明、天候、季節などによる環境変化が激しい屋外では、一日のうちに環境や風景が変化してしまうため、事前に作成した地図と照らし合わせて自己位置を特定するのは非常に困難な場合もあります。加えて、Direct Visual SLAMは、GPSが断続的にしか利用できない場合でも、長距離で車線レベルの精度を提供することが可能です。VINSにおいては、独自のVisual SLAMのアルゴリズム、先進的なセンサ融合、カメラ・IMUとGNSSデータ及び、深層学習アルゴリズムにより同等の性能をわずかなコストで実現します。
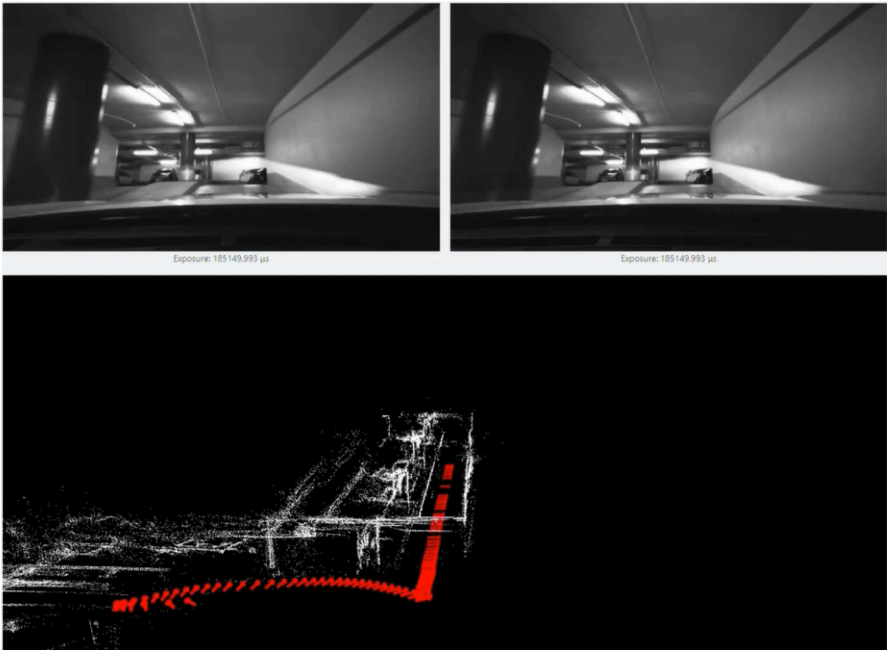
図4:Artisense VINS開発キットのインターフェースの簡易イメージ
3. KdLidar:3D-Lidar SLAMの主な利点は、精度と堅牢性であり、特に屋内や、屋内と屋外の混合環境を含む非GPS環境において威力を発揮します。なお、3D-LidarセンサはSLAMに非常に適しており、多くの中間処理を必要とせずとも、Kudanのアルゴリズムですぐに使用できるデータを提供します。これらのセンサの多くは長射程であり、物体やその周囲の構造物の正確な奥行き情報を点群として提供しており、これをSLAMで直接利用することにより、cmレベルの精度を実現することができます。特に360度の視野を持つ3D-Lidarと組み合わせる場合、人や車、動体などの変化に富んだ物体に直面しても、堅牢性を確保したSLAMを提供しています。
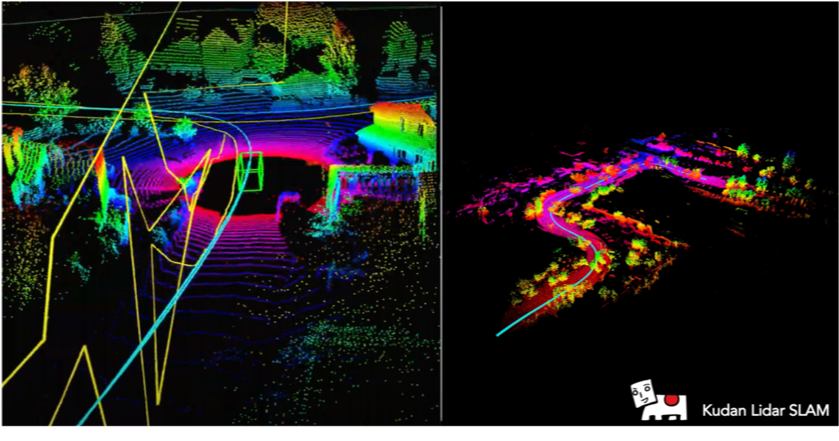
図5:KdLidarが作成した点群マップで、GPS(黄色)とKdLidar(水色)の軌跡を比較したもの
― Artisenseは、Kudanグループの1社であり、ミュンヘン工科大学発のコンピュータビジョンのスタートアップ企業でもあります。社内でのアーティセンスの位置づけとは?
Artisenseは、Kudanにとっての次の成長エンジンといえます!Artisenseは、ArtiSLAMというパッケージ製品を持ち、すでにソフトウェアがリファレンスハードウェアに統合されているため、クライアントとの研究開発やクライアントの製品との統合プロセスの加速化が可能です。また、Kudanにとっては、中長期で有効な技術力を確保するために必要な、最先端の研究にアクセスすることが可能となります。というのも、Artisenseは、2016年にミュンヘン工科大学(TUM)からのスピンオフとして設立されており、Artisenseの技術開発には、TUMのコンピュータビジョンラボのDaniel Cremers教授が深く関わっています。同教授のコンピュータビジョンラボには世界で最も権威のある学術研究チームの一つがあり、SLAM研究の分野をリードしています。
― Kudanの中長期の経営戦略のなかで、“Eyes to the all machines”というビジョンを掲げていますよね。これは具体的にはどういう意味で、このビジョンをどのように実現しようとしているのでしょうか。
“Eyes to the all machines”とは、簡単に言うと、機械における空間認識のコア技術を構築するということです。KudanのSLAM技術によって、すべての機械、ロボット、そして動体が自己位置や周囲の状況を理解できるようにしたいと考えています。我々は、コンピュータビジョン業界のARMになることを目指しています。ARMは、多くのコンピューティングプラットフォームにおいてプロセッサ・アーキテクチャを提供していますが、ほとんどのエンドユーザーは、自分のデバイスのプロセッサにARMのアーキテクチャが使われていることは知りません。このように、多くのエンドユーザーがその事実に気付かなくともKudanとしてはできるだけ多くの機械やデバイスにSLAMを活用してもらいたいと考えています。
我々はこのビジョンに向けて、プロセッサやセンサのOEMと密接に協力しながら、SLAMソフトウェアをこれらのコンポーネントと一緒に提供しつつ、開発者がより簡単にKudanのSLAMにアクセスできるようにするなど、複数の方法で実現に向けて邁進しています。また、5Gネットワークの拡大が進んでいることから、SLAMに5Gを活用して、“SLAM as a Service”(サービスとしてのSLAM)を提供することに大きな可能性を感じています。これにより、エッジデバイス上のセンサと5G受信機のみが必要となるため、デバイスの軽量化と低コスト化の実現が可能となり、クラウド上においてSLAMを実行しながらも完全な空間認識ができるようになります。この目的を達成するためにも、すでに複数の大手通信事業者と協業しています。
― Kudanは元々日本の会社ですが、ヨーロッパ、特にドイツ市場においては、Kudanをどのように位置づけていますか?
実は、Kudanにはユニークな歴史があります。Kudanは、日本人の創業者が英国人のCTOと英国のブリストルで出会い、ARマーケティング事業を始めたことで誕生しました。最初はAR SDKを提供していましたが、現在はSLAM APIを提供するなど、常に進化を続けています。主要なエンジニアリング業務はまだ英国で行っていますが、現時点においてはヨーロッパよりも日本からの売上の方が多くなっています。しかし、我々は、日本以外の地域をより注視しており、英国での研究開発のほかミュンヘンのArtisenseが加わったことで、ヨーロッパ、特にドイツでのエキサイティングな成長機会が見え始めています。ドイツにおけるArtisenseのネットワークとプレゼンスも十分に活用していく予定です。
― 今後のKudanに期待できることは何でしょうか?
SLAMソフトウェアを使用した製品がどんどん市場に出てくることをお楽しみいただきたいです!現在進行中のプロジェクトのなかには、今年または来年の初頭に商業的に立ち上げる予定のものもあります。また、市場の開発者がKudanのソフトウェアにアクセスする機会を増やすためにパートナー企業と積極的な取り組みを行っています。この勢いを加速させて、Artisenseとともにビジョンを実現していきたいと考えています。どうぞご期待ください!
※本インタビュー記事の原文はelektroniknet.deに掲載されています。
※※オリジナルの記事には一部画像が割愛されておりますが、本記事の和訳版では、分かりやすさを重視し残しています。
【Kudan株式会社について】
Kudan(東証上場コード: 4425)は機械(コンピュータやロボット)の「眼」に相当する人工知覚(AP)のアルゴリズムを専門とするDeep Tech(ディープテック)の研究開発企業です。人工知覚(AP)は、機械の「脳」に相当する人工知能(AI)と対をなして相互補完するDeep Techとして、機械を自律的に機能する方向に進化させるものです。 現在、Kudanは高度な技術イノベーションによって幅広い産業にインパクトを与えるDeep Techに特化した独自のマイルストーンモデルに基づいた事業展開を推進しています。
詳細な情報は、Kudanのウェブサイト(http://kudan.io/jp/?lang=ja)をご参照ください。
■会社概要
会 社 名:Kudan株式会社
証券コード:4425
代 表 者:代表取締役CEO 項 大雨

