ホイールオドメトリ統合:シンプルながら強力なセンサ統合
SLAMを用いる様々なユースケースでは、自己位置推定の機能をより堅牢で信頼性の高いものにするために複数のセンサを用いています。ホイールオドメトリは、車輪をもつロボットを用いる適用事例において最も利用されるセンサの一つで、ロボットの各車輪の回転数・角度を計測することでロボットの動きについての情報を出力するものです。ホイールオドメトリの情報はカメラの情報と非常に補完的であるため、これら2つのセンサデータを統合することで、ロボットが自身の位置を見失うことがほとんど起こり得なくなります。
Kudan独自のSLAMアルゴリズムを更に磨き上げるなかで、ホイールオドメトリの統合について大きく強化・性能向上をしたことをお知らせいたします。
ホイールオドメトリ統合は、特に動く物体が数多くあり環境変化が大きい環境、暗くて特徴点(※1)が少ない環境などで威力を発揮
カメラのみを用いたビジュアルSLAMは多くの環境で十分活用可能で、GPSや特別な固定装置の設置が不要なうえ、安価なセンサを活用できるなど様々な利点を有しています。一方で、完璧でないことも事実です。例えば、使用する環境が、真っ白で何も物体が置かれていないような部屋、特徴点のない部屋、非常に暗い部屋、時々刻々と見た目が変化する環境では、カメラのみを用いたビジュアルSLAMは非常に困難です。しかし、ホイールオドメトリは車輪の回転のみを用いるため、上記のような環境変化からは影響を受けず、問題なく動作し、カメラからの情報を補完します。
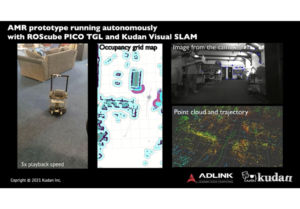
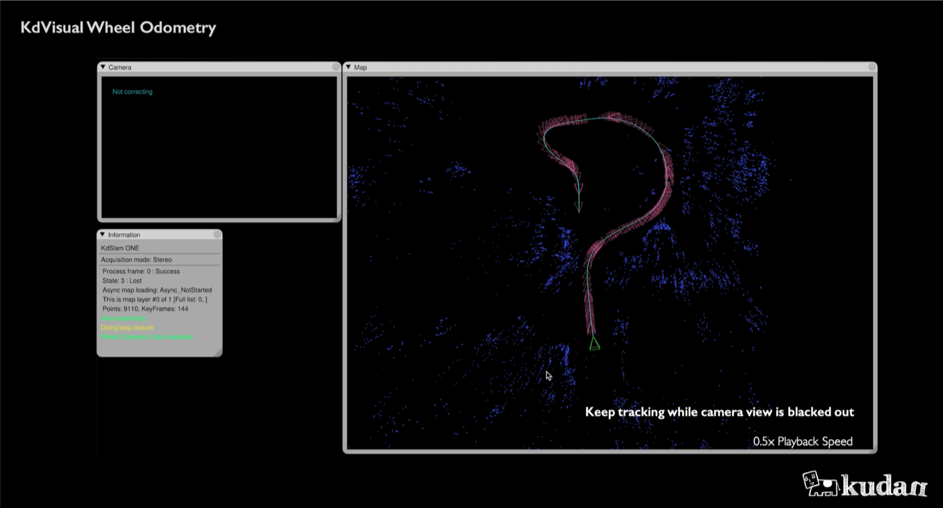
次のデモ動画は、ホイールオドメトリの統合の効果を示しています。カメラの視界をしばらくの間真っ暗にしても、それでもなおSLAMシステム全体としてはホイールオドメトリの統合によってロボットの位置を正確に把握し続けることが可能となっています。
デモ動画:
Kudan Visual SLAM: Wheel odometry improvement
今後も精度や堅牢性を向上させるとともに、我々の顧客が多様な環境と様々なセンサセットアップでKdVisualを利用できるように開発を進めてまいります。
(※1):特徴点-カメラ画像のピクセルのうち、SLAMを動作する際に手がかりとなる重要な点。一般的に、白黒の明暗がはっきり分かれている境界線など、明るさが大きく変わるような箇所が特徴点となる。真っ白い壁だけでは、このような明暗の差が生まれないため特徴点が抽出できず、SLAMの動作が困難になる。
【Kudan株式会社について】
Kudan(東証上場コード: 4425)は機械(コンピュータやロボット)の「眼」に相当する人工知覚(AP)のアルゴリズムを専門とするDeep Tech(ディープテック)の研究開発企業です。人工知覚(AP)は、機械の「脳」に相当する人工知能(AI)と対をなして相互補完するDeep Techとして、機械を自律的に機能する方向に進化させるものです。現在、Kudanは高度な技術イノベーションによって幅広い産業にインパクトを与えるDeep Techに特化した独自のマイルストーンモデルに基づいた事業展開を推進しています。
詳細な情報は、Kudanのウェブサイト(http://kudan.io/jp/?lang=ja)より入手可能です。
■会社概要
会 社 名: Kudan株式会社
証券コード: 4425
代 表 者: 代表取締役CEO 項 大雨
■お問い合わせ先はこちら