自動運転やロボティクス領域のいくつかの適用事例では、大規模な運用への適応能力が非常に重要
前回のマップ統合機能についての記事でも述べたように、大規模な運用が想定される適用事例では、精度と安定性に加えて、その規模への対応を可能にする機能が非常に重要です。このような、運用するエリアが非常に大きくなり、運用する車両やロボットの数が非常に多くなる事例では主に2つの課題があります。
一つ目の課題は、ロボットが利用する地図のデータサイズです。都市や国全体で運用される可能性があり、全てのデータをロボットに保持させる場合、そのエリア全体の地図をロボットが保持し、常に利用できる状態にしなければなりません。しかし、このような大きな地図を常にロボットのメモリに載せておくことは現実的には不可能に近く、ロボットが実際に自己位置推定に必要な地図のみを効率的にメモリに載せておくことが必要となります。
二つ目の課題は、作成した地図の更新作業です。もし各ロボットが各自地図をローカルに保持する場合、地図を更新する際には、全てのロボットのローカルにある地図を更新する必要があります。加えて、運用エリアが大きくなれば、その分地図のどこかで変更があり(風景や周辺環境が大きく変わるなど)更新の頻度は高くなります。これを実現しようとすると、非常に大きなデータのやりとりが発生し、それに伴う人的リソースも大きなものとなります。それぞれのロボット1台1台を見れば、そのオペレーションの範囲は限定的であり、ロボットから遠く離れたエリアの地図の更新を毎回行う必要もありません。
マップストリーミング:SLAMに用いるメモリ使用量を最低限に抑え、一つの地図データを必要に応じて複数の機器が利用
これらの課題を克服する上で、「マップストリーミング」機能が非常に有効になります。どのような機能か、下記のデモ動画をご覧ください。
デモ動画
Kudan 3D-Lidar SLAM (KdLidar) update: Map streaming
このデモ動画が示すように、地図全体をメモリに読み込むのではなく、必要な部分のみを読み込んでいます。車両が地図上を移動するにしたがって、新たに必要になりうる区画の地図を読み込みつつ、不要になった(既に車両から遠く離れた)区画の地図はメモリから取り除くことで、メモリの使用量を最低限に抑えています。
デモ動画では、ハードディスクからメモリに地図を読み込んでいますが、これを応用し、クラウドやネットワーク上に地図全体を保持させておき、必要な部分だけを随時ネットワーク経由でダウンロードすることでハードディスク・メモリ両方の使用量を抑えることができます。
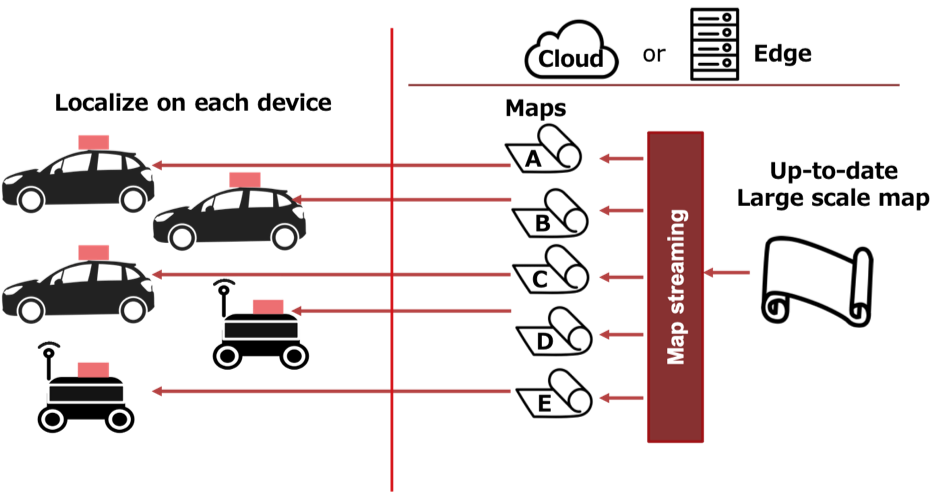
加えて、クラウドを利用して、各車両やロボットが大きな地図をローカルで保持しておく必要がなくなれば、地図の更新作業も容易になります(下図参照)。各端末が頻繁に地図を更新する必要はなくなり、クラウド上の地図が最新であるようにさえしておけば、各端末は必要になった際に必要な部分のみの地図をダウンロードするだけになります。これによって非常に運用台数の多い適用領域では、地図の更新作業の労力を大幅に削減することが可能です。
マップ統合機能と併せて、マップストリーミング機能は、様々なプレーヤーが今後運用規模を拡大していくために非常に重要となると考えています。実際に、自動車OEMの顧客の1社はこの機能を使い、自動運転関連ソリューションがより運用規模を拡大しやすいものになるように取り組んでいます。また、通信会社や5G関連企業に対しても、5GとSLAMを組み合わせて付加価値を生むソリューションのキーとなる機能として強い関心を呼んでいます。
【Kudan株式会社について】
Kudan(東証上場コード: 4425)は機械(コンピュータやロボット)の「眼」に相当する人工知覚(AP)のアルゴリズムを専門とするDeep Tech(ディープテック)の研究開発企業です。人工知覚(AP)は、機械の「脳」に相当する人工知能(AI)と対をなして相互補完するDeep Techとして、機械を自律的に機能する方向に進化させるものです。現在、Kudanは高度な技術イノベーションによって幅広い産業にインパクトを与えるDeep Techに特化した独自のマイルストーンモデルに基づいた事業展開を推進しています。
詳細な情報は、Kudanのウェブサイト(http://kudan.io/jp/?lang=ja)より入手可能です。
■会社概要
会 社 名: Kudan株式会社
証券コード: 4425
代 表 者: 代表取締役CEO 項 大雨