Kudan Inc. (headquarters in Shibuya-ku, Tokyo; CEO Daiu Ko, hereafter “Kudan”) is pleased to share one of the latest video demonstrations of Kudan 3D-Lidar SLAM※ (hereafter “KdLidar”). This is for the mapping & surveying sector, which has strong needs for 3D-Lidar SLAM.
3D-Lidar SLAM has significant value in the mapping & survey sector
The results of mapping and surveying include a wide variety of applications such as road inspection, facility management and maintenance, progress monitoring of construction sites, and more recently digital twinning. These markets are large and growing. According to Markets and Markets, Geospatial solution market has 239 Billion USD size in 2019 and is expected to grow at 13% CAGR to 2024※2.
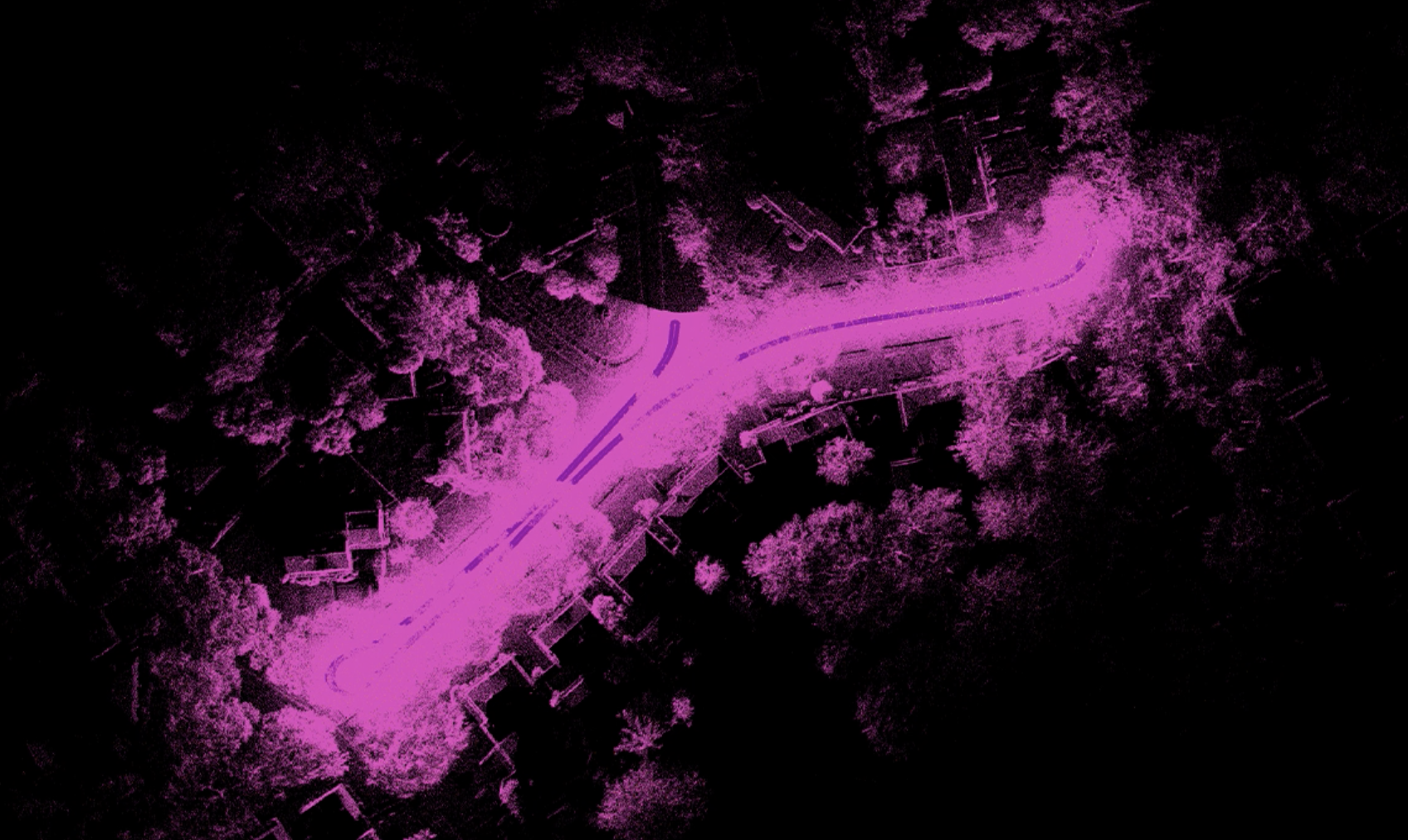
In order to create a high-quality point cloud map, accurate position information of the scanning sensors is essential. When the position information is not accurate or not consistent throughout the scanning process, the resulting maps may be imprecise and blurred.
Many mapping systems incorporate an Inertial Navigation System (INS) for acquiring position information. However, high-quality INS systems can have prohibitively high costs, which poses a challenge for many applications to meet the desired performance under the desired budget. A good 3D-Lidar SLAM solution can compensate for a high-cost INS, especially considering GNSS-denied environments, such as urban canyons, underground, or covered structures. Integrating a 3D-Lidar SLAM solution can help create better maps across wider operating environments, or significantly lower the system cost by reducing the INS performance requirements while maintaining the quality of the maps created.
KdLidar works more robustly across different sensor and mounting configurations than other alternatives
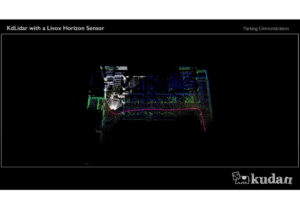
This video shows KdLidar running with a tilted Velodyne HDL-32E (this dataset was provided courtesy of LIDARUSA). What makes this challenging for SLAM is the tilted Lidar mount as illustrated below. The tilted mount is suitable for road inspection but it causes the Lidar sensors to capture less uniquely identifiable objects and structures around it, which creates a challenge for most 3D-Lidar SLAM solutions.
The demo movie regarding KdLidar:
KdLidar works more robustly across different sensor and mounting configurations as shown in this video. KdLidar generally performs best on a horizontally mounted orientation, but KdLidar provides unparalleled flexibility and robustness, while delivering higher quality and performance expected than other Lidar SLAM software. This robustness and flexibility enable us to approach more use-cases and companies. Kudan has been already receiving positive feedback on KdLidar accuracy on both typical horizontal mounting and other case-by-case requirements.
※:SLAM (simultaneous localization and mapping) is a technology which allows devices to simultaneously self-locate and create maps of their surrounding environment. Kudan owns 3D-Lidar SLAM technology utilizing both cameras and 3D-Lidar sensors, and along with the widespread use of Lidar, 3D-Lidar SLAM is being well-used in areas such as autonomous driving, autonomous machines and mapping.