In this article and the demo video, we share our latest case study of forklift localization using KdVisual in a warehouse. Real-time location systems (RTLS) for forklifts have gained more and more traction from the industrial sectors as a part of digital transformation. The accurate and continuous understanding of multiples of forklift’s positions and orientations brings important values for following aspects:
- Collision prevention and safety improvement
- Routing and navigation optimization
- Task prioritization
- Operator performance monitoring
- Accident investigation and analysis
- Improved inventory management
Companies have introduced various approaches of RTLS to achieve accurate and robust position tracking. We are not going to compare them in this article but SLAM-based one is one of the major approaches they consider. However, a set of challenges have held them back to really deploy SLAM-based RTLS at scale. The typical challenges are the following:
- Position accuracy gets unreliable when the scenery changes over time
- Difficult to obtain positions when the objects go outside of the pre-populated map
- Cost tends to be prohibitive due to high computing power and memory requirements
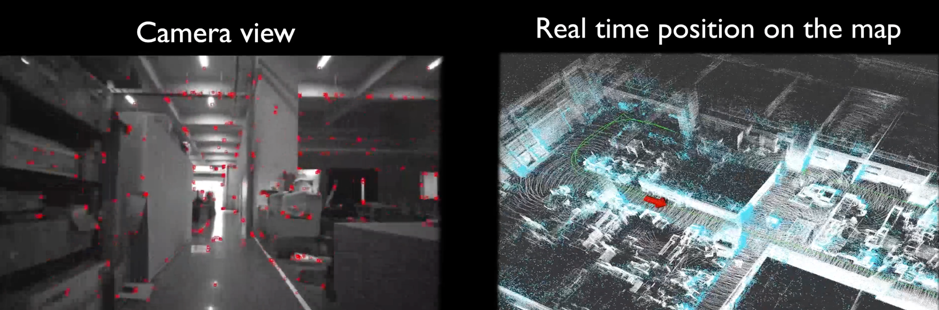
KdVisual can enable our customers to overcome these challenges. This demonstration※ shows that our KdVisual overcomes these challenges in an actual warehouse environment.
- The shutter was closed when the map was created but it was open when the forklift was going through the door. This is a significant scenery change and typical visual SLAM approach would suffer
- The forklift went outside of the map (the outside of the building and the unmapped area in the warehouse). Our system supports forklifts to go in & out of the map and keeps the accuracy throughout
※Demo video
In terms of the hardware cost, our system doesn’t require a high-end camera as input or GPU for SLAM processing, and it can work with a generic camera and small-factor computers which cost several hundreds USD. You can further aim for system deployment and operation efficiency if the SLAM process is deployed to cloud infrastructure, which is supported in Kudan SLAM as well. We are more than happy to talk about it the other time!
Please reach out to us if you are looking for a robust positioning system for RTLS solution and, of course, this works for autonomous mobile robots.
■For more details, please contact us from here.
