前回の記事では、Kudan 3D-Lidar SLAM (KdLidar) がショッピングモールで安定して動作する事例を紹介しました。今回は、Kudan Visual SLAM (KdVisual) が工場で安定して動作する事例をご紹介します。
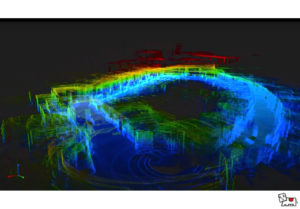
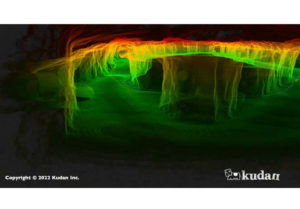
今回紹介するデモ動画では、工場の通路をロボットが動いていく間、KdVisualが常に安定して位置認識を行っている様子を紹介しています。Intel社のRealsense D455を自動搬送ロボット (AGV) の前面に搭載して画像と深度情報を収集しています。今回のデータはROSTEK Vietnamの協力を得て、アジアの工場の稼働時間中に収集されました。そのデータをリアルタイムで再生しKdVisualで処理をしています。
こちらがそのデモ動画になります。
KdVisualが解決するAGVや自律走行ロボット(AMR)の課題
KdVisualは他のVisual SLAMや位置認識アプローチが抱える課題を解決しつつ、同時に、強力な処理プラットフォームを必要としないように設計されています。
- ロボットの目の前で移動する物体や作業者:SLAMは、カメラ画像上にある様々な物体・模様が画像上でどのように動くかを元に、ロボットの姿勢や動きを計算しています(例えば、様々なカメラ画像上の物体が全体的に時間と共に上に移動していれば、カメラが下に動いていると判断します)。カメラの視野内に動く物体や人がいると、その動きがSLAMシステムを惑わせて精度が低下します。デモ動画では数多くのカートや作業員がカメラの近くを通り過ぎており、容易にロボットの位置認識の精度を低下させる可能性もありますが、KdVisualではこのような性能低下が見られません。
- 風景・環境変化:最初に地図を作成したときから様々な風景・環境の変化がある場合、ロボットが位置認識をできなかったり、位置認識の精度が落ちることが通常です。しかし、KdVisualでは、長年の様々な現場でのテストによって確立した独自のSLAMシステム・オペレーションモードを持ち、このような環境でも安定した性能を発揮します。この動画でも、移動式のカートや一時的な棚などが様々な場所に見られ、SLAMにとって容易ではない環境であることがわかります。
繰り返し精度(Repeatable/relative accuracy)
繰り返し精度(一定の場所にいかに正確に何度も戻ることができるか)は、工場や倉庫などでのAGV/AMRの導入には非常に重要な性能指標です。我々自身による評価でも、顧客による評価でも、KdVisualは一貫して1cm以内の繰り返し精度を実現しています。これにより、AGVやAMRが所定の場所でパレットなどの荷物を積み降ろしたり、充電場所に正確に戻ることができます。
これら以外にもご紹介したい様々な機能や性能がありますが、それはまたの機会に!
【Kudan株式会社について】
Kudan(東証上場コード: 4425)は機械(コンピュータやロボット)の「眼」に相当する人工知覚(AP)のアルゴリズムを専門とするDeep Tech(ディープテック)の研究開発企業です。人工知覚(AP)は、機械の「脳」に相当する人工知能(AI)と対をなして相互補完するDeep Techとして、機械を自律的に機能する方向に進化させるものです。現在、Kudanは高度な技術イノベーションによって幅広い産業にインパクトを与えるDeep Techに特化した独自のマイルストーンモデルに基づいた事業展開を推進しています。
詳細な情報は、Kudanのウェブサイト(http://kudan.io/jp/?lang=ja)をご参照ください。
■会社概要
会 社 名: Kudan株式会社
証券コード: 4425
代 表 者: 代表取締役CEO 項 大雨
■お問い合わせ先はこちら