長く狭い廊下でのLidar SLAMの難易度は?
「オフィスビルや産業用施設での長く狭い廊下」はロボティクスやマッピングにおいて、よく遭遇しうる環境です。しかし、構造的に同じような風景が繰り返されることと、屋内であるためGPSが使えないことが組み合わさり、これはSLAMの観点では非常に難易度の高い環境となります(3D Lidar SLAMがどのような仕組みになっているかは こちらのブログ記事(英語のみ)をご覧ください)。今回は、この一般的にSLAMが難しいと言われる環境でも、簡易なセットアップでKudan Lidar SLAMが安定して高い性能を発揮している事例を紹介します。
Kudan Lidar SLAMは、難易度の高い環境でも、外部センサなしで高い精度を実現
今回のスキャンは、Ouster社のlidar(OS1-32)を下記のような手持ちのセットアップで行い、lidarとその内部IMUを用いて自己位置推定とマップ作成を行っています。
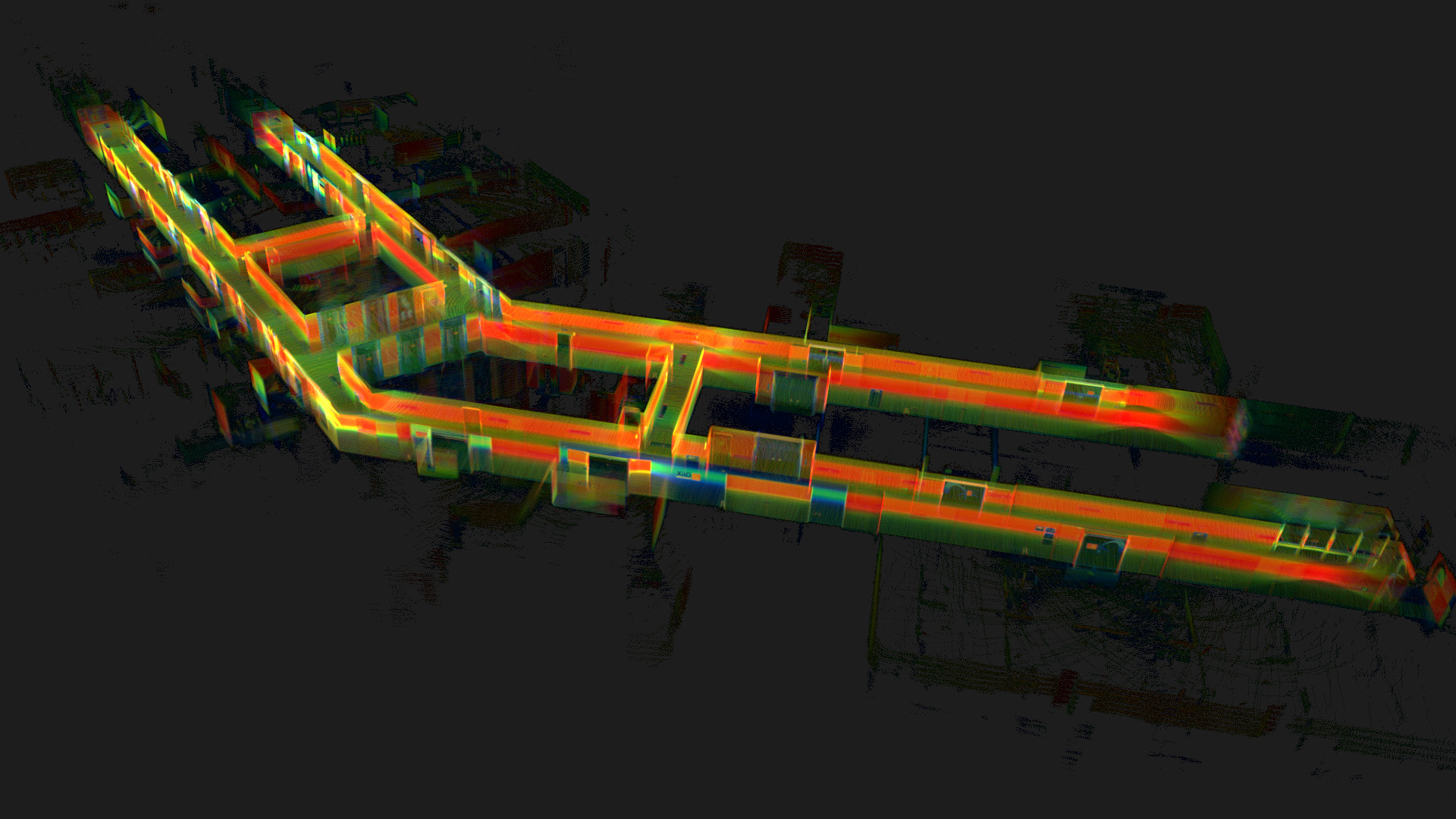
Kudan Lidar SLAM in action: In long narrow corridors in an office building
(データ・写真提供: 韓国のUCS)
Kudan Lidar SLAMは「loop closure」と呼ばれるより精度を高めるための機能を搭載しています。今回のスキャンでは、そのloop closure機能がいくつかの箇所で動作の軌跡をより精度の高いものへと最適化を行っているのですが、そもそも発生しているドリフト(誤差)が非常に限定的なため、デモ上ではほとんどその機能の効果が見られません。これは難しい環境でも、Kudan Lidar SLAMが高い精度を発揮することを明確に示していると言えます。
今回の環境でのSLAMは具体的には次のような適用事例で有効となります。
- オフィスビルや産業施設での自律走行サービス・点検ロボット
- 維持・点検用途でのオフィスビルのマッピング
- 商業ビルの工事の進捗管理
下記がより詳細な今回のデモに関する情報です。
- データを取得した区画: 各廊下の長さが50m - 60m
- 使用したセンサ:Ouster OS1-32 3D lidar(他外部センサ使用せず。ただしKudan Lidar SLAM自体はGPSやIMUといった他センサ統合が可能)
- SLAMの様子はリアルタイムでの処理。後半の点群の写真は事後処理によって生成。
類似の環境でのロボティクス、マッピング、屋内位置把握やその他様々な環境でのSLAMのニーズがあれば、ぜひお問い合わせください。
【Kudan株式会社について】
Kudan(東証上場コード: 4425)は機械(コンピュータやロボット)の「眼」に相当する人工知覚(AP)のアルゴリズムを専門とするDeep Tech(ディープテック)の研究開発企業です。人工知覚(AP)は、機械の「脳」に相当する人工知能(AI)と対をなして相互補完するDeep Techとして、機械を自律的に機能する方向に進化させるものです。現在、Kudanは高度な技術イノベーションによって幅広い産業にインパクトを与えるDeep Techに特化した独自のマイルストーンモデルに基づいた事業展開を推進しています。
詳細な情報は、Kudanのウェブサイト(http://kudan.io/jp/?lang=ja)をご参照ください。
■会社概要
会 社 名: Kudan株式会社
証券コード: 4425
代 表 者: 代表取締役CEO 項 大雨
■お問い合わせ先はこちら

