ROBOT SOLUTION
デジタルツイン連携
自律移動型
巡回点検ロボット
ソリューション
ロボットを単なるセンサーではなく
「自律的な点検エージェント」へ。
Physical AIとデジタルツインの統合による
次世代インフラ点検。
OVERVIEW
点検業務を
「人手依存」から「自律化」へ
Kudanのデジタルツイン連携-自律移動型巡回点検ロボットソリューションは、Physical AIを支える弊社独自の空間知覚技術、高度なロボット自律走行スタック、デジタルツインプラットフォームを緊密に統合し、そしてサイバー安全性への配慮を一体的に設計した、次世代のインフラ点検ソリューションです。
従来のようにロボットを単なる遠隔操作センサーとして扱うのではなく、本ソリューションではロボットを自律的に判断・行動する点検エージェントとして位置づけ、その活動結果を生きたデジタルツインへ直接接続します。
これにより、点検計画から現地実行、分析の自動化、レポーティング、そしてエンタープライズシステム連携までを一気通貫で実現し、プラント、工場、倉庫、公共インフラといった複雑で安全性に厳しい施設に最適化されたエンドツーエンドのワークフローを提供します。
CHALLENGES
従来のロボット点検における課題
スケーラビリティ、安全性、意思決定の面で、
現場は構造的な課題を抱えています。
FEATURES
主な特長と導入効果
多様なタスク実行:
点検から物理的操作へ
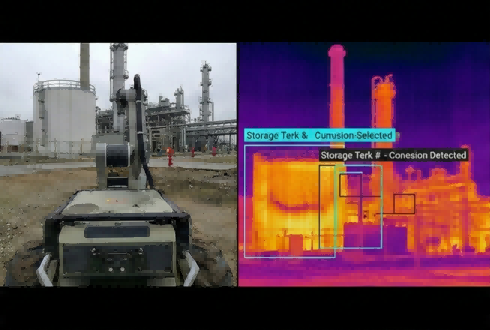
マルチモーダルな広範囲点検
RGB/HDR、サーマル、振動・音響、ガス・臭気など多様なセンサーに対応し、主観に頼らない自動化を実現。
観測にとどまらない物理的インタラクション
ロボットアーム搭載機にも対応。ボタン操作、メーター読み取り、接触点検など、能動的な介入へ領域を拡張。
リスク重視の点検実行
Physical AIが高リスク部位や重要資産を優先的に判断し、リソースを最適配分。

受動的なデータ収集から、
能動的な点検・介入へ拡張し、
作業品質を維持
複雑かつ動的な環境での
高い運用信頼性
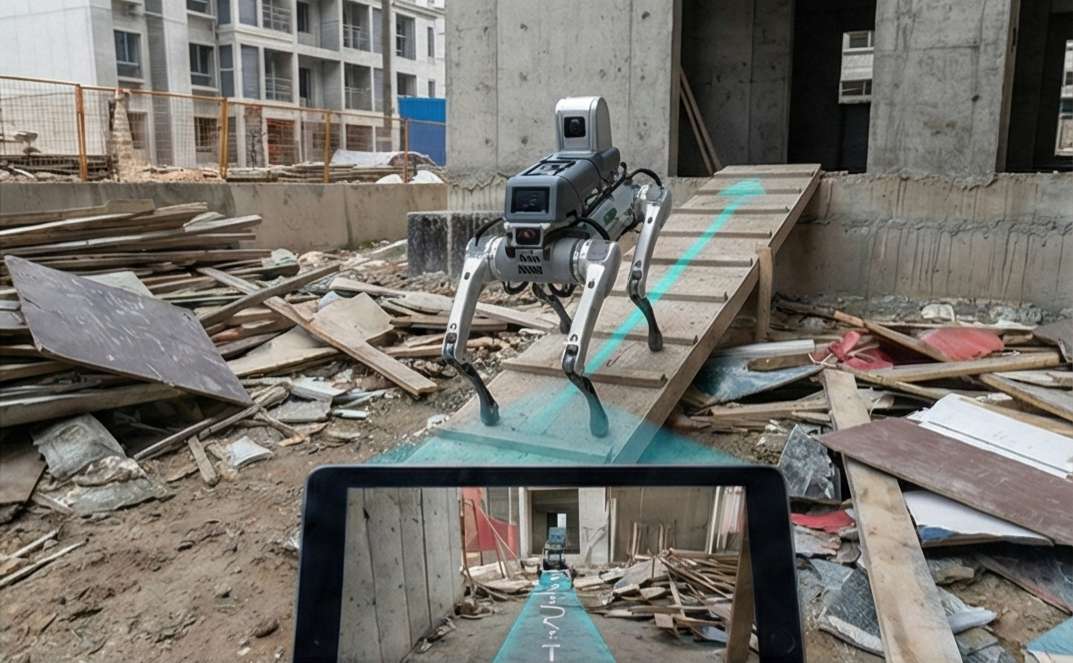
実環境に対応した高度な移動性能
階段、スロープ、不陸、狭隘空間など、屋内・屋外・混在環境での走行が可能。
シーン認識型の適応ナビゲーション
環境を継続的に評価し、安全な経路選択や再計画、障害物からの自律復帰を自動実行。
デジタルツインを活用した点検計画シミュレーション
フォトリアリスティックなデジタルツイン上で、点検ルートや視点を事前に計画・シミュレーションし、展開前にアクセス性・点検品質を検証。
複雑な環境でも
安定的な運用を実現し、
点検作業の失敗リスクを低減
3Dベース統合
データベース:
Kudan PRISM
フォトリアリスティック・デジタルツイン
取得データを、テクスチャや微細なひび割れも再現するフォトリアルな3Dモデルへ変換。現地そのままの状態を再現。
空間に紐づいた点検記録
全てのデータを正確な3D位置に紐付け。現場とオフィス間の認識齟齬を排除し、Single Source of Truthを実現。

現地を忠実に再現した
3Dデジタルツインに
点検情報を整理統合し、
関係者間の迅速かつ明確な
連携を実現
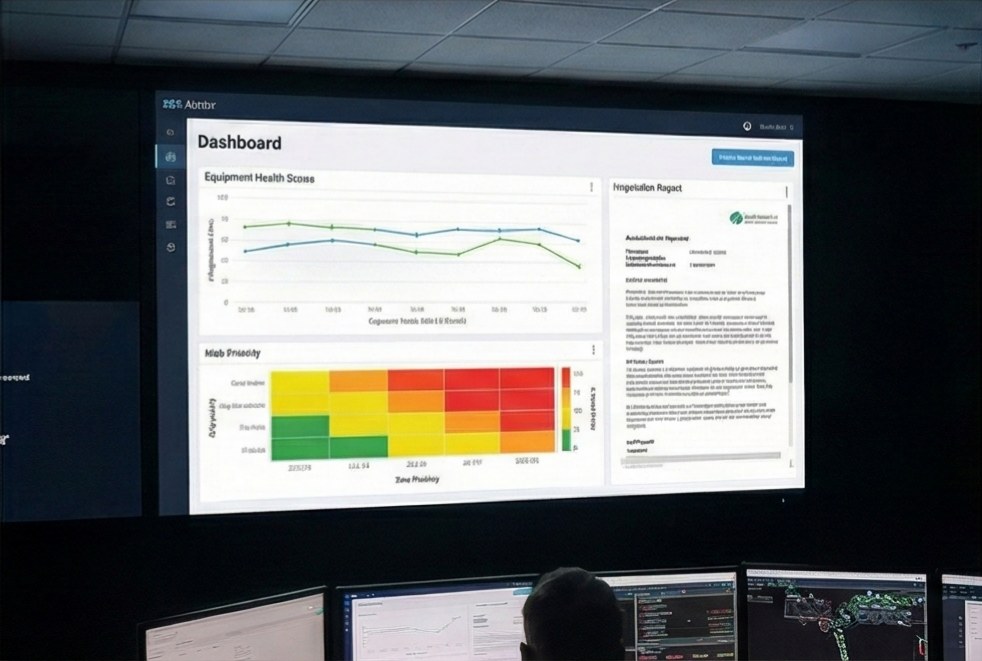
実行可能な知見を生む
自動事後分析
生データから意思決定へ
センサーデータを自動的に健全度スコアやリスク評価へ変換。人手による解析負荷を削減。
時系列・劣化トラッキング
時系列デジタルツインにより、劣化傾向の可視化や異常変化の早期検出を実現。
スケーラブルなコスト効率
高性能ロボットに比べ低コストで高自動化を実現し、点検対象を数拠点から数百拠点へ拡張可能に。

事後対応型から
予兆保全型への転換し、
ライフサイクル保全コストを削減
戦略的インパクト
Physical AIによるロボット点検と、
フォトリアリスティックなデジタルツインを統合することで、
点検業務を「断続的で人手依存の作業」から、
「継続的・スケーラブル・知能化されたプロセス」へと変革します。
主要ソリューション構成要素
検査内容および対象環境に最適化された
ハードウェアおよびソフトウェアのパッケージ

物理ロボットプラットフォーム
―現実世界に“到達し、触れ、作業する”ための基盤―
多様な移動方式と拡張性を備え、人が立ち入れない場所でも安全かつ安定して検査を実行。ロボットアームによる操作やエッジAI処理により、現場での確実な検査を実現。
センシングおよび空間インテリジェンス
―センサーデータを“意味のある空間理解”へ―
マルチセンサと空間認識技術により、設備・構造・異常を意味として理解。ロボットを単なるセンサー装置から、状況を判断できる検査エージェントへ進化。
自律ナビゲーションおよびミッション実行
―複雑で変化する現場でも止まらない自律検査―
現場状況を判断しながら経路を最適化。障害物や環境変化があっても、人手に頼らず検査を継続。
解析・自動化・レポーティング
―データを“意思決定”へ変換―
不具合検出や劣化分析を自動化し、リスクと優先度を可視化。レポート作成の手間を減らし、迅速な意思決定を支援。
デジタルツインおよび3D検査データベース
―検査結果を一元管理する3D統合基盤―
検査データをフォトリアルな3D空間に統合。位置・時間と紐づいた記録により、誰でも直感的に状況を把握。システム連携およびエンタープライズ統合。

システム連携およびエンタープライズ統合
―検査を業務プロセスへ統合―
保全・資産管理システムと連携し、複数拠点の運用を一元管理。検査をスケール可能な業務基盤へと進化。
物理ロボットプラットフォーム
―現実世界に“到達し、触れ、作業する”ための基盤―
多様な移動方式と拡張性を備え、人が立ち入れない場所でも安全かつ安定して検査を実行。ロボットアームによる操作やエッジAI処理により、現場での確実な検査を実現。
センシングおよび空間インテリジェンス
―センサーデータを“意味のある空間理解”へ―
マルチセンサと空間認識技術により、設備・構造・異常を意味として理解。ロボットを単なるセンサー装置から、状況を判断できる検査エージェントへ進化。
自律ナビゲーションおよびミッション実行
―複雑で変化する現場でも止まらない自律検査―
現場状況を判断しながら経路を最適化。障害物や環境変化があっても、人手に頼らず検査を継続。
解析・自動化・レポーティング
―データを“意思決定”へ変換―
不具合検出や劣化分析を自動化し、リスクと優先度を可視化。レポート作成の手間を減らし、迅速な意思決定を支援。
デジタルツインおよび3D検査データベース
―検査結果を一元管理する3D統合基盤―
検査データをフォトリアルな3D空間に統合。位置・時間と紐づいた記録により、誰でも直感的に状況を把握。システム連携およびエンタープライズ統合。
システム連携およびエンタープライズ統合
―検査を業務プロセスへ統合―
保全・資産管理システムと連携し、複数拠点の運用を一元管理。検査をスケール可能な業務基盤へと進化。
想定導入環境
複雑で安全性に厳しい施設に最適化された運用環境

公共インフラ・土木構造物
- トンネル
- 橋梁
- 鉄道施設

産業プラント・プロセス設備
- 化学プラント
- 発電所
- 製鉄所

ユーティリティ・地下設備
- 下水・排水
- 共同溝
- 浄水施設

屋外・混在環境
- 港湾
- 建設現場
- エネルギー施設
導入の基本手順
初回お問い合わせから最短約3か月で
トライアル導入が可能です
ニーズ・環境分析および提案
お客様のユースケース、運用環境、各種要件を詳細にヒアリングし、最適な構成を提案します。
技術・運用PoC
実環境または類似環境での実証実験を行い、実現可能性とROIを検証します。
ユースケース固有の開発および実装
本番導入に向けたカスタマイズ開発、システム連携、現場へのデプロイを実施します。
次世代のインフラ点検を、
ここから始めましょう
Kudanのデジタルツイン連携-自律移動型巡回点検
ロボットソリューションの
詳細資料や導入に関するご相談は、
下記よりお気軽にお問い合わせください。