ROBOT SOLUTION
位置推定・マッピング
(SLAM)
あらゆる環境で
“迷わない”ための、
商用グレードSLAM
Kudan GrandSLAM
高精度・高ロバストな
6DoF自己位置推定を、
あらゆる現場へ
Kudanの自己位置推定・環境地図作成技術 Kudan GrandSLAM は、
実環境での運用を前提に設計された商用グレードのSLAMです。
多様なセンサーの潜在能力を最大限に引き出すことで、屋内・屋外、整地・不整地、照明や天候の
変化がある環境でも、安定した自己位置推定とマッピングを実現します。
商用運用・開発を
前提とした設計
開発・導入のしやすさ
C++ライブラリとして提供
ROS2 ラッパー対応
NVIDIA Jetson、Intel、Raspberry Pi 対応
商用グレードの
パフォーマンス
高精度・低レイテンシ・高安定性
実環境での厳しい条件下でも確実な動作を保証
大規模マップへのスケーラブルな拡張
工場全体や広域エリアのマッピングにも対応
他システムとの容易な統合
既存の自律走行システムへの組み込みをスムーズに
Kudan Visual SLAM
オンロード・オフロード双方に対応する、商用グレードVisual SLAM
KudanのVisual SLAMは、高速処理・低メモリ消費・高精度・高堅牢性を同時に実現した、実運用に耐える商用SLAMです。
オープンソースや一般的な商用アルゴリズムが抱えがちな精度・レイテンシ・安定性の課題を克服しています。
舗装された道路環境(オンロード)だけでなく、未舗装路・起伏のある地形・自然環境を含むオフロード環境においても、安定した自己位置推定を可能にします。
主な特長
高速・低遅延な自己位置推定
動的で複雑な環境でも安定したトラッキング
多様なカメラ構成に対応 (Stereo / RGB-D / Mono / Fisheye / 360° / Multi)
デモンストレーション
セマンティック動的マスキング
人物などの動的オブジェクトをセマンティックに認識し、マッピング・トラッキングから動的に除外。これにより、移動体が多く存在するダイナミックな環境でも、より安定した地図生成と自己位置推定を実現します。
SuperPoint
深層学習ベース特徴点抽出。従来のVisual SLAMが苦手としてきた屋外環境・季節変化・天候変化に対応。異なる環境条件下でも高い確率で正確な再ローカライゼーションを可能にします。
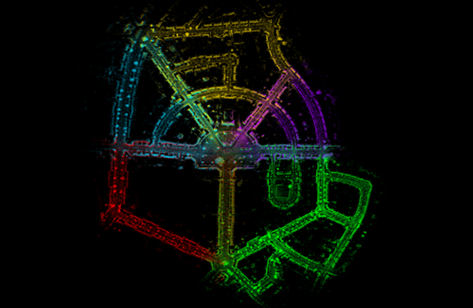
Kudan 3D-LiDAR SLAM
Kudanの3D-LiDAR SLAMは、従来方式が抱えていた 精度・マップサイズ・レイテンシやロバスト性の課題を根本から解決します。
圧倒的な性能
自己位置推定誤差
1cm 以内
※使用3D-LiDAR及び環境に依存
マップサイズ
最大 1/300 へ圧縮可能
レイテンシ
ほぼゼロ
ポーズ出力
最大 60Hz
IMU統合+特許取得の高周波センサーフュージョンにより
長いトンネルでも安定した位置推定を実現
幅広いLiDAR対応
回転式LiDAR
ソリッドステートLiDAR
プリズム式LiDAR など、ほぼ全タイプに対応
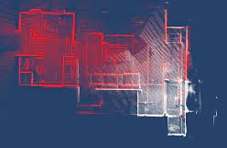
高品質な点群生成
マッピング中にLiDARデータのブレを検知・補正
より鮮明な点群生成と、自己位置推定精度の向上を同時に実現
デモンストレーション
マップハンドリング
大規模・長期運用を支える実用的マップ管理機能
SLAMで生成した地図を、運用フェーズまで見据えて管理できます。
作成した地図データの柔軟な運用により、長期的な自律走行システムの安定稼働を支えます。
マップハンドリング
- 保存
- 統合
- 更新
条件変化対応
異なる環境条件(天候・時間帯など)で作成した複数マップの動作中の切り替えに対応