
3Dデータを、
判断・予測・行動
につながる空間洞察へ
Kudanは、ロボティクスおよびデジタルツインのための空間知覚技術を中核に、
物理空間を認識・理解・編集・解析するコアアルゴリズムの開発を推進しています。
セマンティック3D空間理解、シミュレーション向け3D空間編集、環境変化・差分解析、予測型リスク解析により、
現実世界から取得される3Dデータを、単なる可視化情報ではなく、
意思決定と自律的な行動を支えるフィジカルAI基盤へと進化させます。
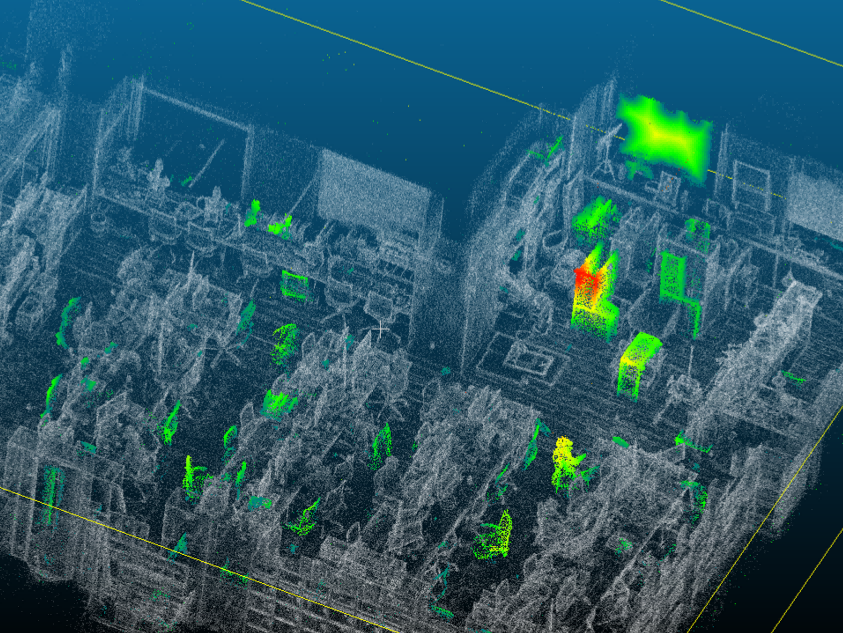
セマンティック3D空間理解
物理空間を、AIが意味として理解する
カメラ、LiDAR、点群、3DGSなどから取得される空間データを解析し、設備、構造物、通路、作業エリア、危険領域などを自動的に認識・分類します。
ロボットやデジタルツインが、現実世界を単なる3D形状ではなく、意味を持つ空間として理解するための基盤技術です。
- 設備、構造物、通路、作業エリアなどを自動認識
- 移動可能領域、危険領域、立入制限エリアを分類
- 空間内の対象物や領域の役割・関係性を理解
- 自律移動ロボット、設備点検、施設管理に活用
- 3Dデータを「見える化」から「理解可能な空間情報」へ拡張
シミュレーション向け空間編集
現実空間を、シミュレーション可能なデジタル環境へ
実空間から取得した高精度・写実的な3Dデータを、ロボットシミュレーション、設備計画、作業検証、運用最適化に利用しやすい形へ編集・構造化します。
現実に基づいたデジタル空間上で、経路計画、レイアウト変更、安全性確認などを事前に検証できるようにします。
- 不要要素の除去や空間データのクリーンアップ
- 床、壁、通路、障害物、設備などの領域分割
- 移動可能エリアや進入禁止エリアの定義
- 物理属性や意味情報を付与したシミュレーション空間を構築
- ロボット走行、作業手順、レイアウト変更の事前検証に活用
環境変化・差分解析
変化し続ける現場を、継続的に把握する
継続的に取得・更新される3D空間データを比較し、現場環境の変化や差分を自動的に抽出します。
設備配置の変更、障害物の発生、構造物の変化、劣化や損傷の兆候などを検知し、デジタルツインを現実世界と同期し続けます。
- 過去と現在の3D空間データを自動比較
- 設備、什器、障害物の移動や追加を検出
- 構造物の変化、劣化、損傷の兆候を抽出
- 建設・保守・点検作業の進捗確認を支援
- デジタルツインを現実世界と継続的に同期
予測型リスク解析
現場データから、将来のリスクを予測する
空間データ、設備情報、センサーデータ、点検履歴、ロボット走行ログなどを統合し、将来的なリスクや運用上の課題を予測します。
故障、劣化、危険箇所、動線上のボトルネックなどを事前に把握し、保守計画、作業計画、ロボット運用の最適化を支援します。
- 空間データ、設備情報、センサーデータを統合解析
- 故障、劣化、異常発生の可能性を予測
- 人、車両、ロボットの動線上のリスクを評価
- 物流・生産・点検業務のボトルネックを特定
- 予防保全、作業計画、施設運用の最適化を支援