
四輪ロボット

四足歩行ロボット

二輪ロボット
概要
広範なパートナーネットワークの支援のもと、自律移動向けの産業用グレードおよび教育用ロボットハードウェアを幅広く提供しています。オープンなプラットフォーム設計により二次開発にも適しており、研究開発、教育、実証実験、さらには産業現場での応用まで柔軟に対応可能です。加えて、Kudanの自律走行ソフトウェアをこれらのロボットへ円滑に導入するための技術支援も提供します。
ユースケース別推奨ロボット(参考)
| 点検・保守 | パトロール | マッピング | 一般輸送 | カスタマー サービス | 組立 | 教育 | 研究 | |
| 四輪 | Y | Y | Y | |||||
| 四足歩行 | Y | Y | Y | Y | Y | Y | ||
| 二輪 | Y | Y | Y | Y | Y |
四輪ロボット
工場、倉庫、プラント、建設現場など、屋内・屋外を問わず動的な環境向けに設計された、幅広い産業用グレードの四輪ロボット。
特定の用途/アプリケーションに合わせて、環境耐性(防水・防塵・防爆など)、積載容量、サイズなど柔軟なオプションを備え、豊富な組み合わせでロボットを設定可能。
使用例:一般輸送、点検・保守、教育、研究開発

FRシリーズ
全方向移動のオムニホイールタイプ

FWシリーズ
ステアリング制御タイプ

FBシリーズ
防爆対応タイプ
その他…
詳細情報
四足歩行ロボット
当社が提供する四足歩行ロボットは、災害現場、建設・土木現場、階段、不整地など、四輪ロボットが進入できない領域での運用が可能です。
さらに、足部に車輪が装備されているため、平坦な地面では標準的な四輪ロボットとして効率的に動作できます。
使用例:点検・保守、マッピング、搬送、教育、研究開発

KM20
高い環境耐性を備えたハイブ
リッド型脚式・車輪式モデル

KX30
優れた耐環境性

KX20
高積載能力と軽量設計
その他…
詳細情報
二輪ロボット
当社が提供する二輪ロボットは機動性に優れており、従来の四輪ロボットが困難な狭い場所だけでなく、傾斜面や段差の上でも安定して走行できます。
主な用途例:点検・保守、マッピング、教育、研究開発
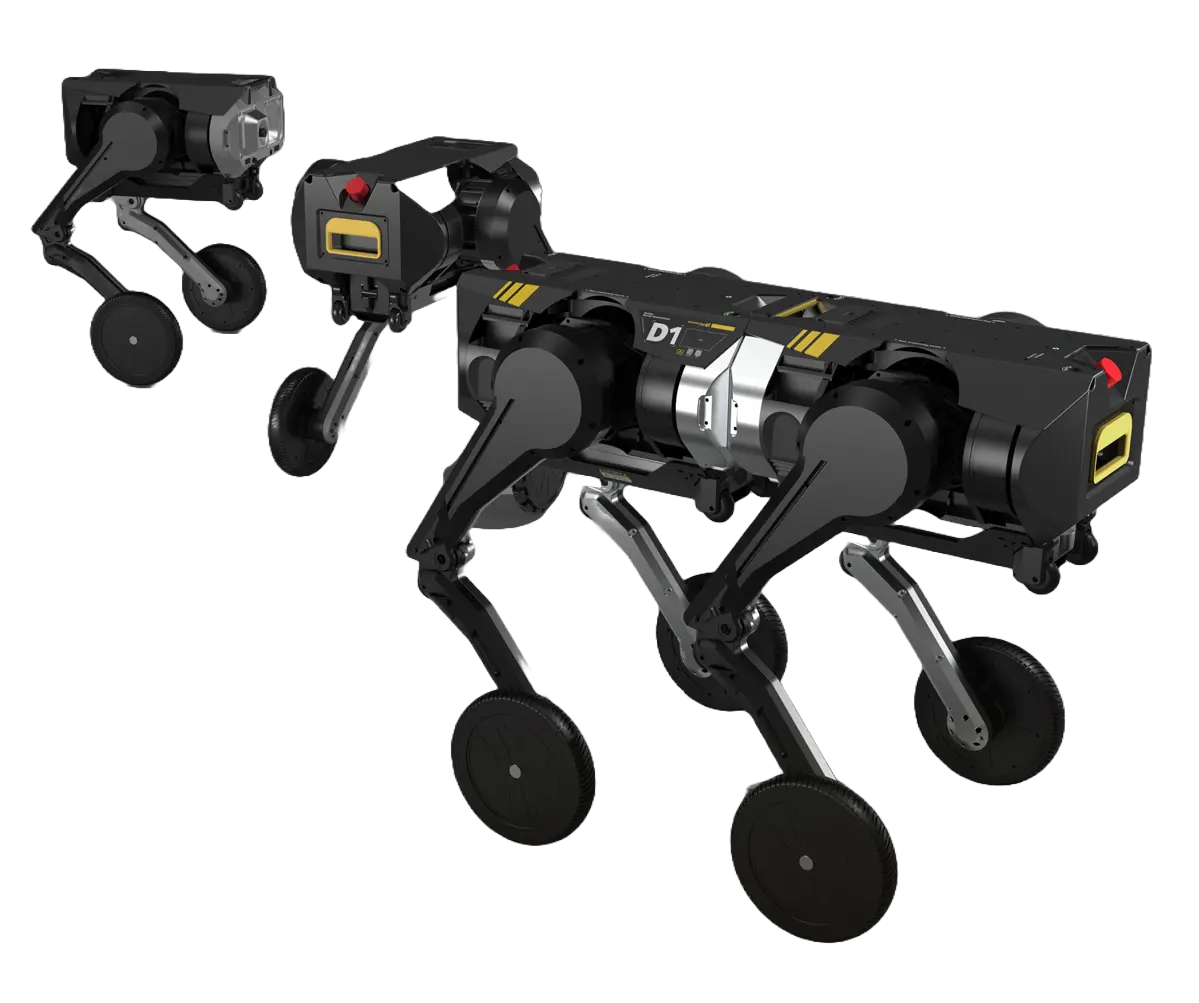
D1
世界初の完全モジュール型
エンボディードAIロボット

DIABLO
世界初のダイレクトドライブ式、
自己バランス型車輪付き
脚型ロボット
その他…
詳細情報
ヒューマノイドロボット
洗練されたデザインと自然な人間のような歩行を備えた次世代オープンソースヒューマノイドロボット。エンドツーエンドニューラルネットワークを搭載し、卓越した機動性と23以上の自由度を実現。商業用途から教育用途まで幅広く対応。
使用例:カスタマーサービス、製造における作業/組立支援、医療、教育、研究開発

PM01
次世代オープンソースヒュー
マノイドロボット
その他…
詳細情報