自律走行ロボットを
“実用化”するまでの
最短ルートを提供
移動ロボットおよび自律走行車両向けに、
商用運用を前提とした包括的な
「ロボットナビゲーションスタック」を提供。
PoCから実運用まで、あらゆる環境で
安定した自律走行を実現します。
実運用を見据えた
ナビゲーションスタック
Kudanは、移動ロボットおよび自律走行車両向けに、実運用を前提とした包括的な「ロボットナビゲーションスタック」を提供しています。 本スタックは、Kudanが提供するロボットプラットフォームに限らず、お客様が既に保有しているロボットや車両、指定ハードウェアにも柔軟に導入可能です。
ユースケースや環境条件に応じた最適化により、PoCから実運用までをスムーズに橋渡しします。 Kudanのナビゲーションスタックを活用することで、自律走行ロボット・車両の検証・開発・実装にかかるリードタイムとリスクを大幅に削減できます。
こんな方に最適です
開発のリスクを最小化し、
最短で市場投入を目指すパートナーへ
FEATURES
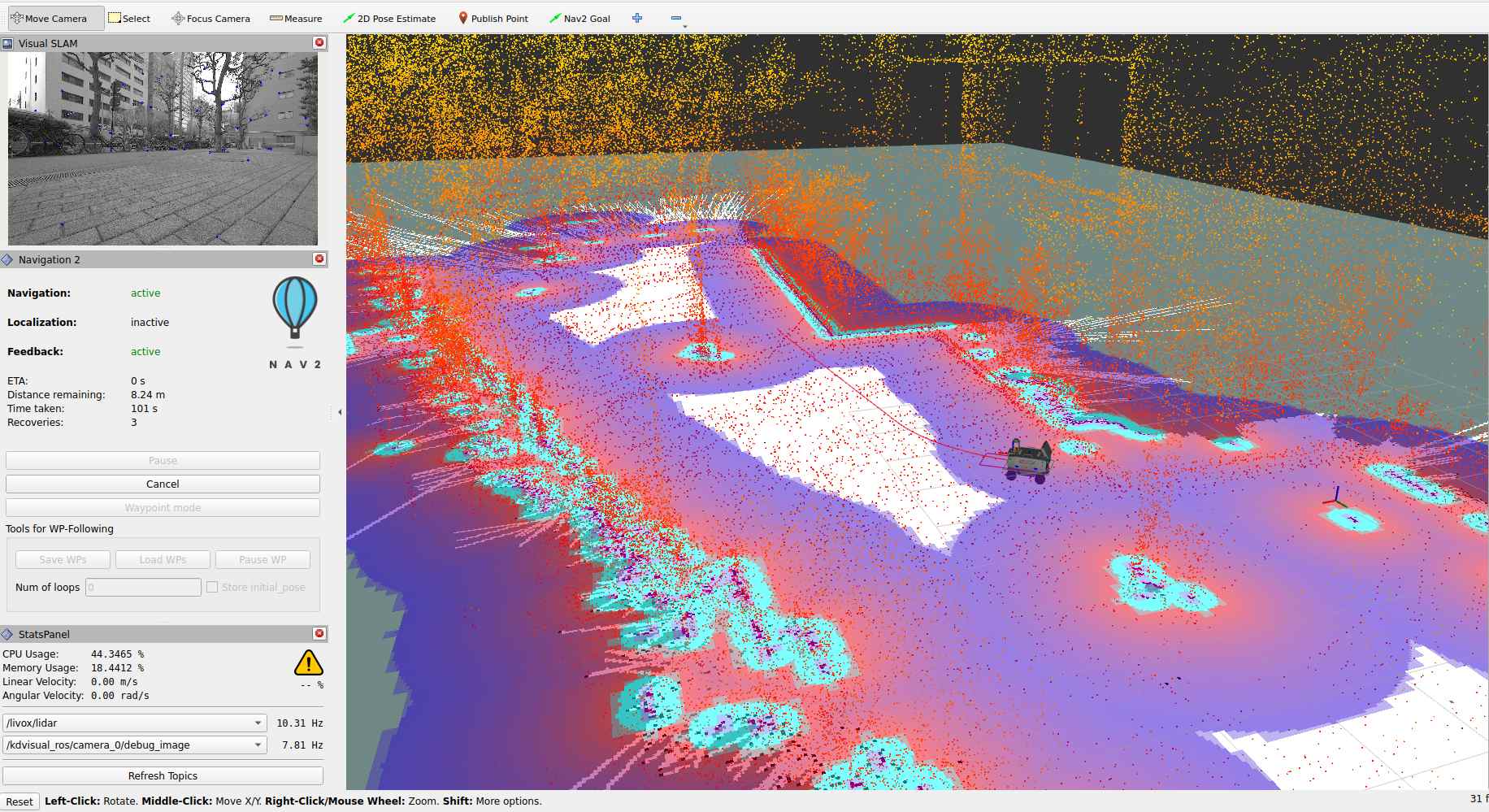
主な機能|実運用を支えるフルスタック構成
堅牢な位置推定から車両制御まで、必要な機能をすべて網羅しています。
堅牢な位置推定・地図作成
経路計画・障害物回避
意味的セグメンテーション
タスク計画および車両制御
マルチセンサー融合
Camera / LiDAR / IMU / GNSS 等
マルチトラッキングモード対応
システム状態監視・ログ管理
シミュレーション環境による検証
対応プラットフォーム
ROS Version
ROS 2
Humble
Jazzy
Architecture
x86
ARM
従来のAMRでは難しかった
環境にも対応
Kudanのナビゲーションスタックは、
既存のロボット/AMRが対応しきれなかった
過酷・複雑な環境での運用を可能にします。

頻繁かつ動的に変化する環境
レイアウト変更や荷物の移動が激しい物流倉庫など

屋内・屋外が連続する混合環境
工場から屋外ヤードへの搬送など光環境が変化する場所

複雑な3D構造、起伏のある不整地
スロープや段差のある建設現場や屋外環境

多数の移動体・人が存在する環境
ショッピングモールや駅構内などの混雑環境

特徴点が乏しい空間
長い廊下やトンネルなど、同じ景色が続く場所

広大なオープンスペース(屋内)
体育館やホールなど、壁までの距離が遠い空間
ユースケースと導入実績

AMR(屋内・屋外)
- 中国 屋内・屋外複合型ショッピングモールにおける、視覚+3D LiDAR融合型AMR (Yours Technologies)
- 中国 屋内・屋外両対応の3D LiDARベース多目的ロボット (Whale Dynamic)
- 米国 建設現場におけるGNSS+3D LiDAR融合型AMR

産業機械/鉱業・林業
- 日本 工場内の屋内・屋外混在環境における自律走行AMRおよびトラック
- 米国 GNSSが不安定な鉱山・採石場でのトラック自律走行
- 日本 トンネル掘削機向け自動ノズル調整

AD / ADAS
- 欧州 複雑な屋外環境における乗用車の自動運転
- 日中 高精度地図作成向け点群生成ツール
- 日本 自動バレーパーキング(AVP)向けVisual SLAM

位置測位
- 日本 フォークリフト動線分析のための走行経路記録システム
- 英国 建設現場作業員の位置測位
自律走行の課題を解決しませんか?
既存環境への導入可否、PoCのご相談など、
まずはお気軽にお問い合わせください。