V-MMS(車両移動マッピングシステム)
概要
高精度移動式マッピングシステム(MMS)は以前から存在していたが、様々な要因により市場での普及には至っていない。クダンのV-MMSは、従来のMMSが直面する課題を克服するために設計された革新的な製品である。
従来のMMSの課題
- 高品質だが高価
点群の品質は高いが、価格が高いため、点群の容易な取得と生成に対する障壁が高い。 - 他の点群データとの統合が困難
単純な位置合わせは可能ですが、点群データの取得は一般的に同一機種のデバイスで行うことを想定しています。 - 使いこなすのが難しい
一定の専門知識が必要であり、使いこなすには時間がかかる。


Kudan V-MMSのコンセプト
- 低コストで高品質な点群データを容易に取得可能。
->最大10分の1の価格で提供。 - ロボティクス事業で培った再位置決め技術を用いた高度なマップ統合を実現。
->サードパーティ製ポイントクラウドと統合可能 - シンプルで使いやすいUIに自動化機能を搭載。
-> 専門知識がなくても利用可能。
出力例
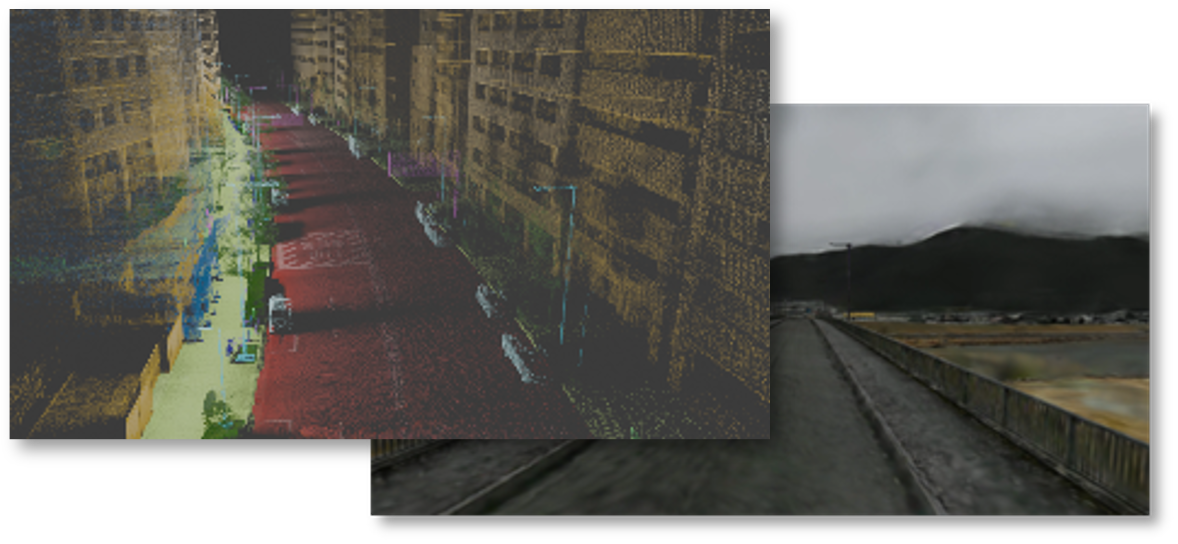
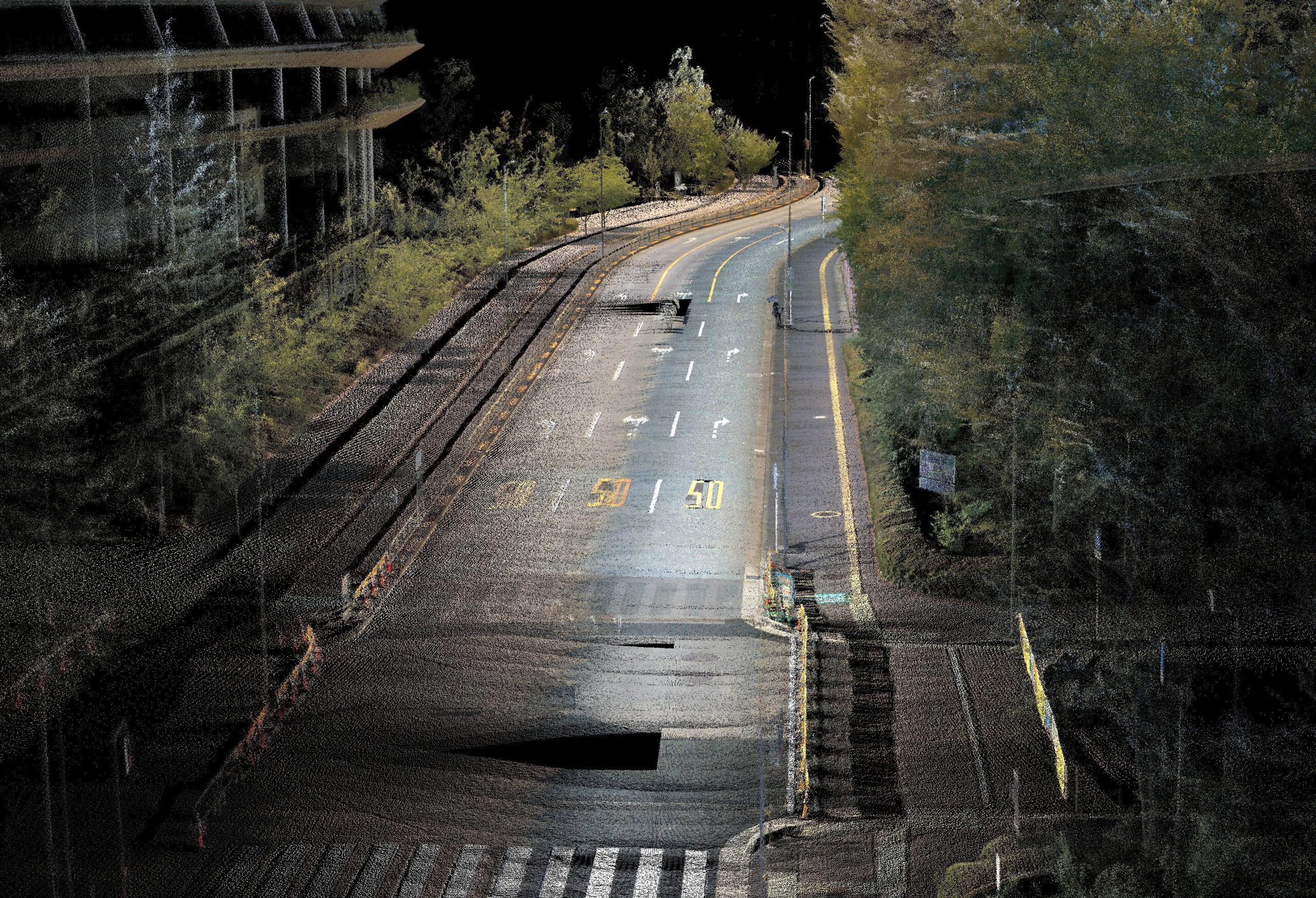
当社は、点群データを生成するだけでなく、最先端のAI技術と組み合わせるなど、幅広い高品質な出力を提供しています。
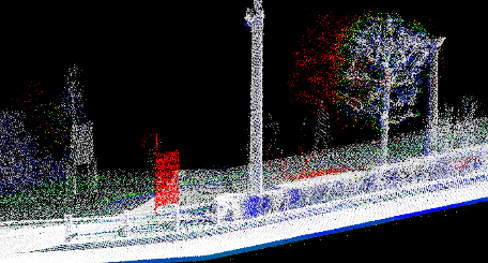
カラー化3D点群

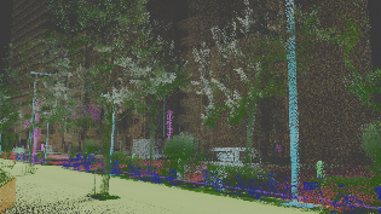
セマンティックセグメンテーション
(3D点群)

地理参照付き高精度画像
車両への実機取付例

特徴
ハードウェア:
既存車両への後付けが可能なシンプルな構成。

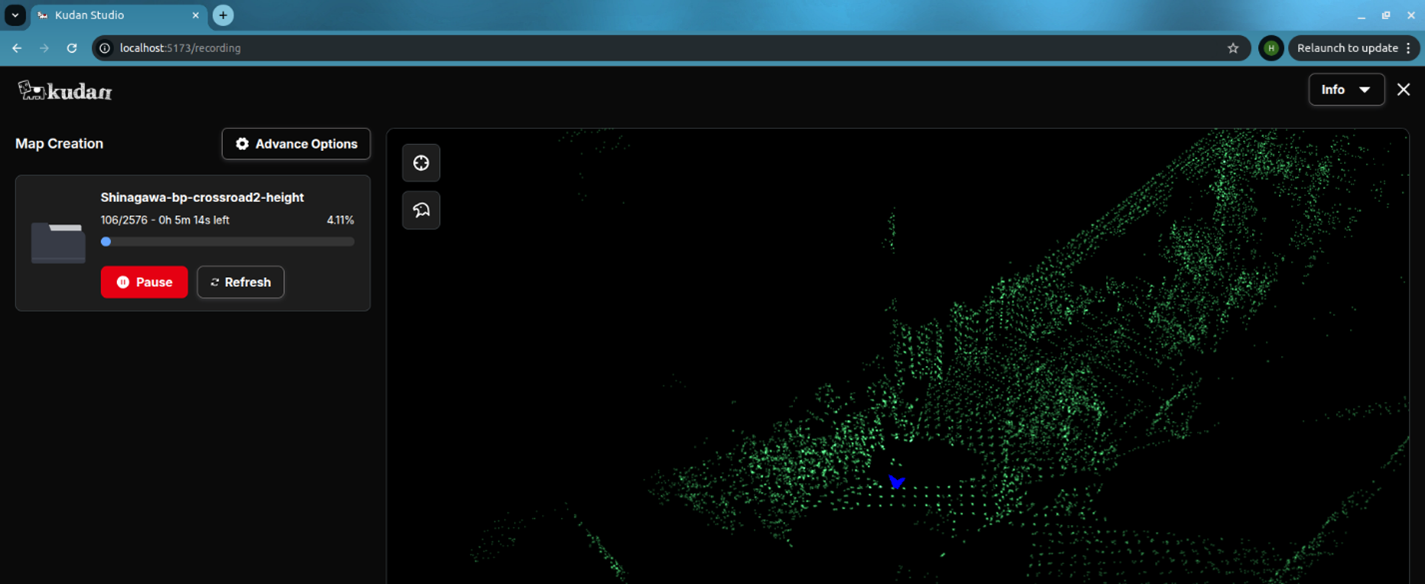
シンプルなUI:
専門知識不要の直感的な操作。
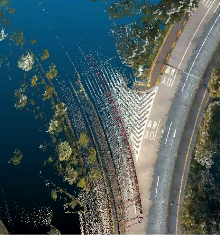
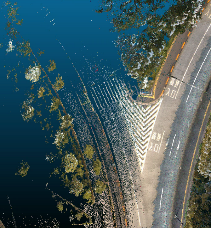
ノイズフィルタリング:
物体認識技術を統合した高度なノイズフィルタリング。
GCP補正:
地上基準点(GCP)入力とマップ全体の精度補正のためのシンプルな
UI。
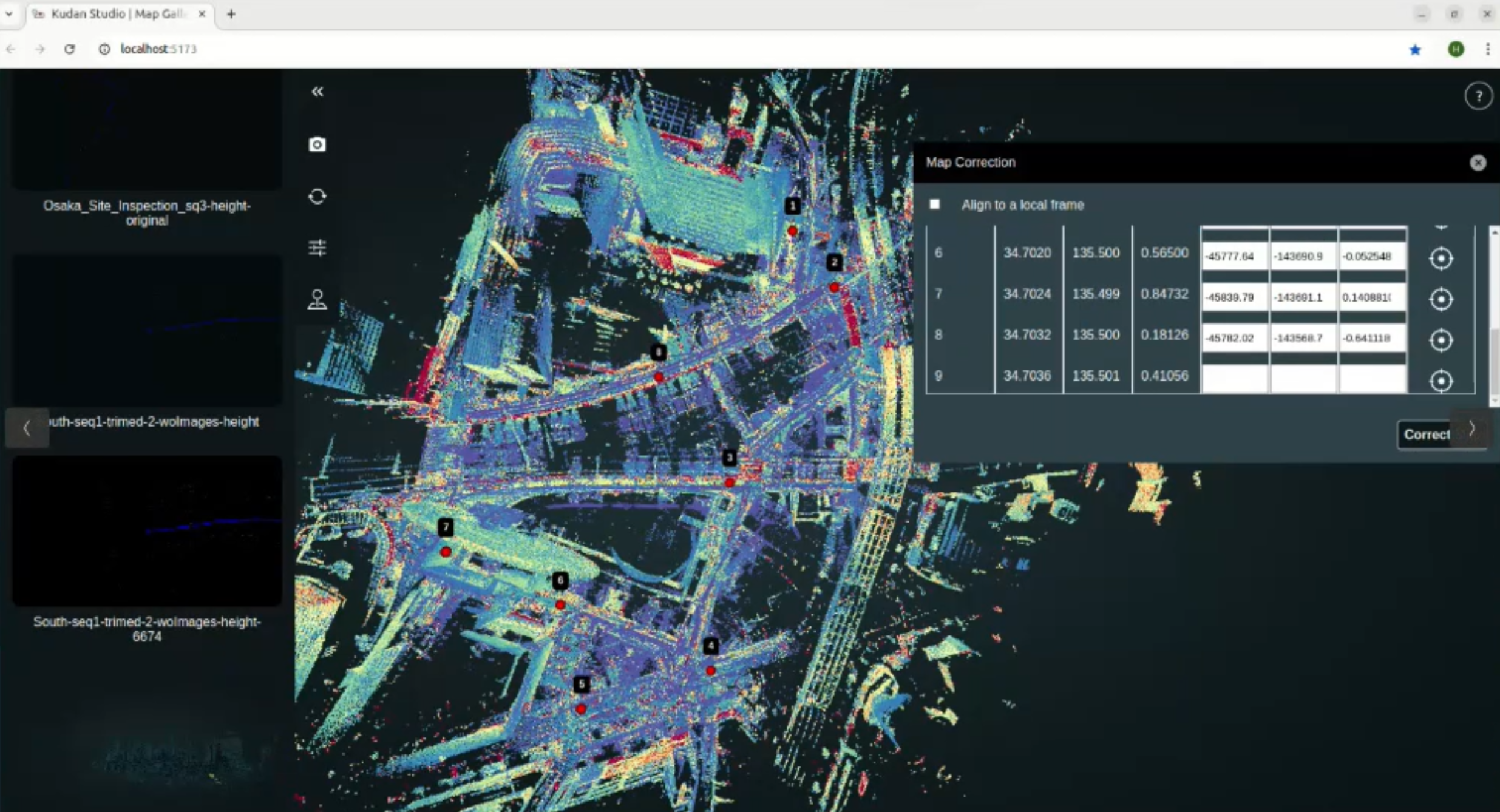
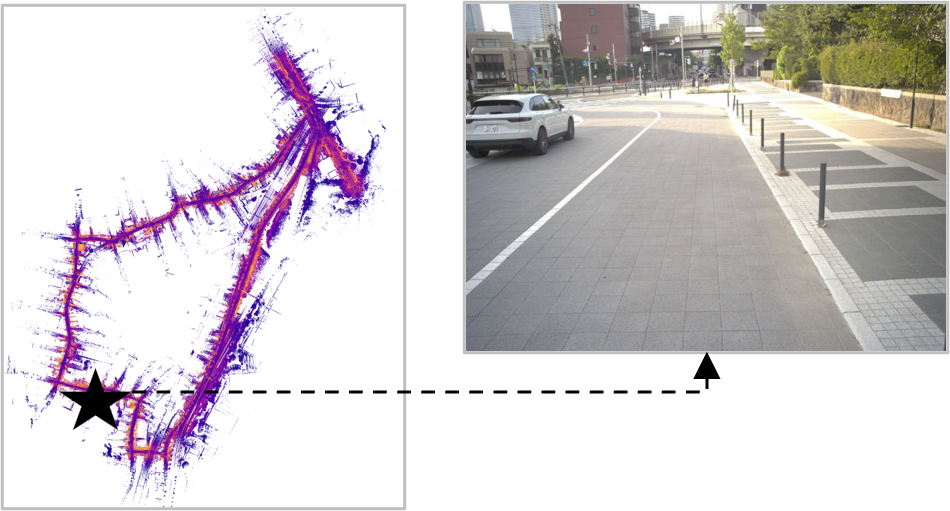
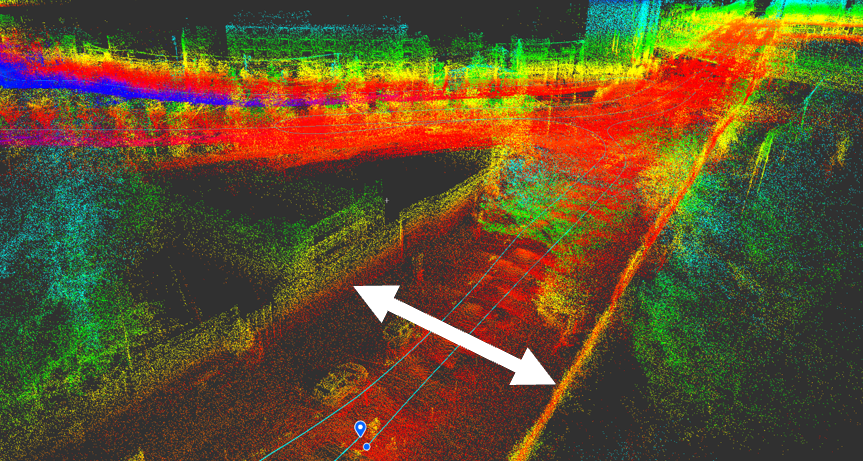
地図処理:
サードパーティ製点群データとの高度な統合も可能。
青: サードパーティ
製点群
白:Kudan点群
赤:2つの点群
データ間の差分
セマンティックセグメンテーション:
AI画像認識技術を用いた点群内オブジェクトのセグメンテーション。
ユースケース
測量
防災・防災管理

自動運転向けHDマップ