
From 3D Data to
Spatial Insight that Drives
Decisions, Predictions, and Actions
Kudan is advancing the development of core algorithms that recognize, understand, edit, and analyze physical spaces, centered on spatial perception technologies for robotics and digital twins.
Through semantic 3D spatial understanding, simulation-ready spatial editing, environmental change and difference analysis, and predictive risk analysis, Kudan evolves physical AI infrastructure from a simple reproduction of the real world into a foundation that supports recognition, decision-making, and autonomous action.
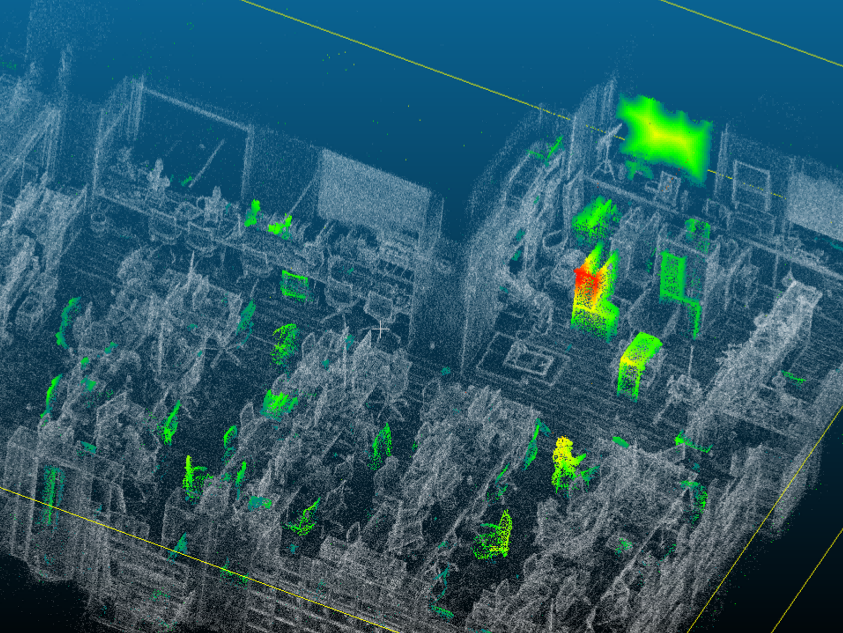
Semantic 3D Spatial Understanding
nabling AI to understand the meaning of physical spaces
Our technology analyzes spatial data acquired from cameras, LiDAR, point clouds, and 3DGS to automatically recognize and classify equipment, structures, roads, work areas, hazardous zones, and more.
By giving robots and digital twins the ability to understand real-world spaces not merely as 3D shapes, but as meaningful spatial information, Kudan enables more advanced autonomous operations and decision-making support.
- Automatically recognizes equipment, structures, roads, and work areas
- Detects and classifies movable or temporary objects, hazardous areas, and entry-restricted zones
- Understands the roles and relationships of objects and areas within a space
- Applies to autonomous mobile robots, facility inspection, and facility management
- Transforms 3D data from “visible” information into “understandable” spatial intelligence
Spatial Editing for Simulation
Transforming real-world spaces into simulation-ready digital environments
Our technology converts high-precision, photo-realistic 3D data captured from real-world environments into digital spaces that are easier to use for robot simulation, facility planning, work validation, and operational optimization.
On a real-world-based digital twin, users can define route plans, modify layouts, verify safety, and conduct pre-validation of operations.
- Removes unnecessary elements and cleans up spatial data
- Separates areas such as floors, walls, roads, obstacles, and equipment
- Defines movable spaces and restricted-access zones
- Builds simulation environments with physical properties and semantic information
- Supports pre-validation of robot navigation, work procedures, and layout changes
Environmental Change and Difference Analysis
Continuously capturing changes in the field
Our technology compares continuously acquired and updated 3D spatial data to automatically detect changes and differences in on-site environments.
It detects changes in equipment placement, the appearance of obstacles, structural changes, deterioration, damage, and other signs of anomalies, while continuously synchronizing the digital twin with the real world.
- Automatically compares past and current 3D spatial data
- Detects the addition, removal, or relocation of equipment, fixtures, and obstacles
- Extracts signs of structural change, deterioration, and damage
- Supports progress monitoring for construction, maintenance, and inspection work
- Continuously synchronizes the digital twin with the real world
Predictive Risk Analysis
Predicting future risks from field data
Our technology analyzes spatial data, equipment information, sensor data, inspection history, robot operation logs, and other inputs to predict future risks and operational issues.
It helps identify potential failures, deterioration, hazardous areas, and bottlenecks in movement routes in advance, supporting the optimization of maintenance planning, work scheduling, and robot operations.
- Integrates and analyzes spatial data, equipment information, and sensor data
- Predicts the possibility of failures, deterioration, and abnormal events
- Evaluates risks for human flow, vehicle flow, and robot movement routes
- Identifies bottlenecks in logistics, production, and inspection operations
- Supports the optimization of preventive maintenance, work planning, and facility operations