〜 ソフトウェアとハードウェアを統合した完全なマッピングソリューションを提供〜
自己位置推定及び環境地図作成をリアルタイムで同時に行う技術(SLAM)のリーディングプロバイダーであるKudan株式会社(本社:東京都渋谷区、代表取締役CEO:項 大雨、以下 Kudan)と、台湾に本社を置くグローバルな組込み技術の専門メーカーであるVecow Co., Ltd.(以下 Vecow)は、両社のパートナーシップにおける最初の目標マイルストーンを達成し、KudanとVecowのコア技術を活用した新世代のモバイルマッピング開発キットの提供を開始したことをお知らせいたします。共同開発したこのマッピングソリューションは、多岐にわたる業界において、正確で包括的な3Dの環境情報を取得したいという需要の高まりに応えるものです。

モバイルマッピング開発キットの提供開始は、前回のリリース(Kudan、Vecowとの戦略的パートナーシップを拡大、屋外向け自律移動及びモバイルマッピングアプリケーションの高まる需要に対応)で発表したKudanとVecowのパートナーシップ拡大における最初のマイルストーンとなります。
SLAMベースの3Dモバイルマッピングは、モバイルプラットフォーム(例:人間、車両、ロボット、ドローン等)が現場を移動する間に自動で3Dのデータを取得する能力により、近年脚光を浴びています。この技術は、スマートシティや都市計画、ICTを活用した建設、インフラの点検・保守、鉱業・採石業における備蓄管理、緊急対応や災害管理など、幅広い用途で活用することができます。
静止したレーザースキャナーを使用し、静的な現場の正確なデータを取得するために時間がかかるTLS(Terrestrial Laser Scanning、地上固定型のレーザースキャナー)ベースの3Dマッピングとは異なり、SLAMベースの3Dモバイルマッピングは、リアルタイムかつ効率的に広大な領域をマッピングすることができることから、市場の注目を集めています。しかし、SLAMベースの3Dモバイルマッピングは、モバイルセンサデータに内在するノイズや不確実性のため、一般的にTLSベースのアプローチほど正確ではありませんでした。このため、高速マッピングの利点を維持しながら、TLSベースのアプローチの精度に近づけるためには、複数センサの融合(マルチセンサフュージョン)が可能な産業グレードのSLAMが重要になります。
マルチセンサフュージョンの場合は特に、時間領域における全てのセンサデータを正確に整合させるために、時刻同期が極めて大きな役割を果たします。この重要なプロセスにより、センサの測定値と対応するランドマークや周辺環境における特徴との正確な関連付けが可能になり、データ処理中のエラーを効果的に減らすことができるようになります。加えて、時刻同期は、非常に重要な動き推定とループクローズ※検出の実現に大きく貢献し、その結果、SLAMベースのマッピングの精度、信頼性、および全体的な品質が大幅に向上することが期待できます。
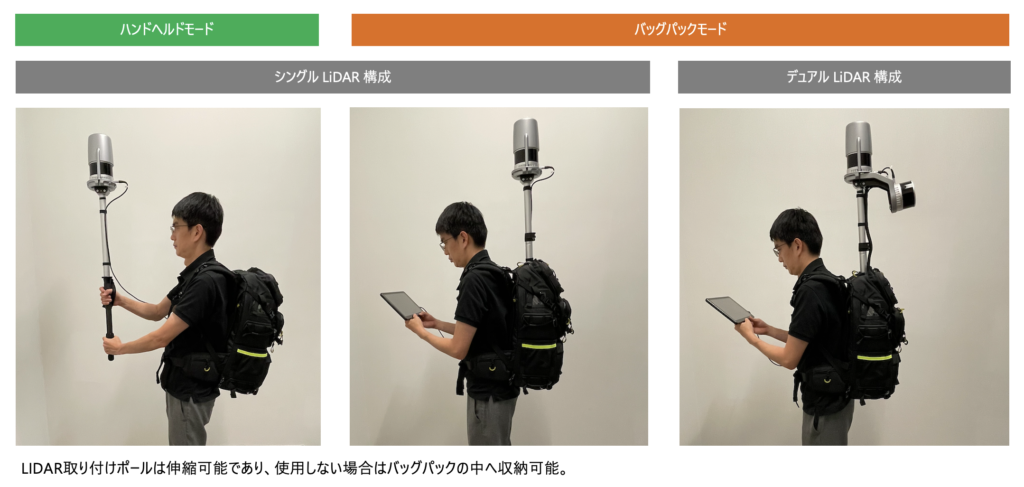
この度の共同開発したマッピングソリューションは、バックパック/ハンドヘルドタイプの3Dマッピングデバイスで、Kudan独自の3D-Lidar SLAM(KdLidar)とマルチセンサフュージョン技術に加えて、Vecowのロバスト性の高いVCM-1000Fコントローラを活用し、正確な時刻同期と効率的なコンピューティングを実現します。
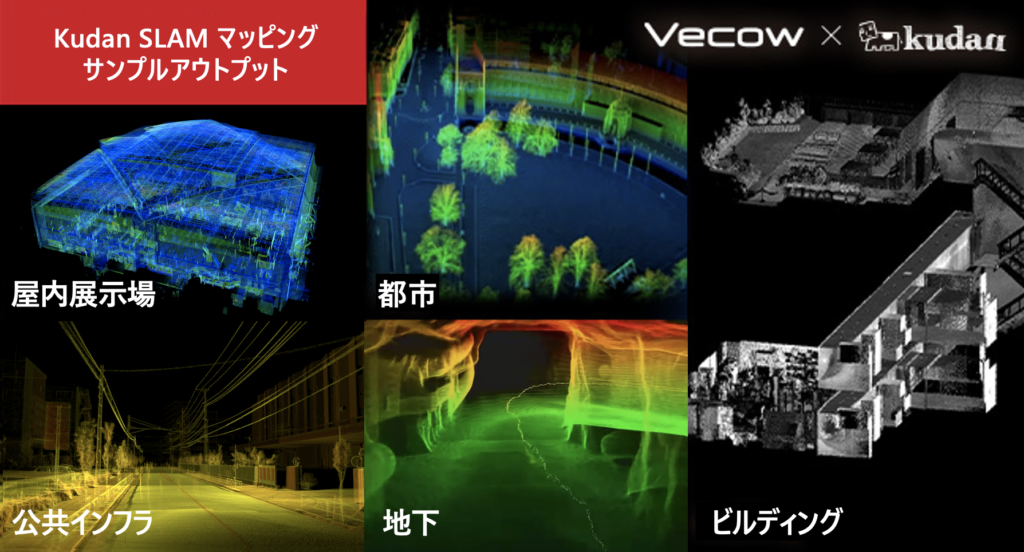
本マッピング開発キットは、GNSS非対応地域を含む様々な環境において、正確な3D点群を効率的かつ堅牢に生成する能力を備えているため、森林調査、ファサード調査、インフラ整備、地下調査、産業用デジタルツイン、設備資産管理、体積計測、ICT建設など、幅広い用途に適しています。
今回のマッピング開発キットは、KudanStudioソフトウェアと組み合わせることで、ユーザーフレンドリーなインターフェースと合理化されたワークフローを提供し、あらゆるレベルのユーザーが利用できるようになります。この直感的な設計により、専門的なスキルを必要とせず、誰でも適切なデータ収集を行い、最大1cm未満の高精度な3D点群を迅速に生成することができます。また、同キットはデータの後処理における詳細なパラメータ設定をサポートし、特定のユースケースに応じた様々な密度やサイズの最適な3D点群の作成を容易にするとともに、元の生データを保持して再利用性を確保します。さらに、マップハンドリング機能を搭載することで、複数の点群データのシームレスな結合を自動化し、効率的な点群整備と広域でのデータ活用の実現に貢献します。

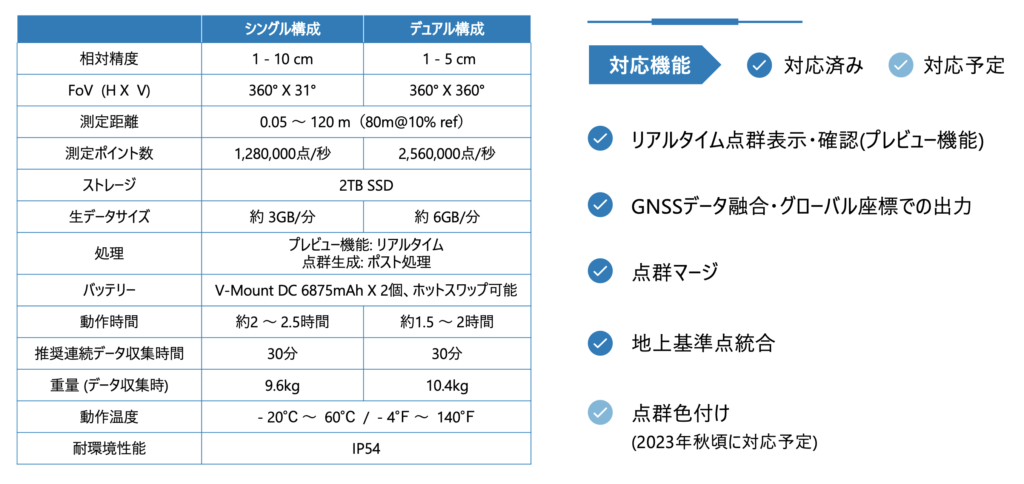
Kudan/Vecowのモバイルマッピング開発キットの仕様詳細:
マッピングソリューションの詳細については、こちらまでお問い合わせください。
VecowのVCM-1000シリーズのソリューション詳細については、こちらよりご確認ください(英語のみ)。
Kudan 取締役COOのハオ ティエンのコメント
この度の共同マッピングソリューションの提供開始については、提携の有効性と最先端技術の統合の価値を示す顕著な事例といえます。
洗練されたアルゴリズムと高度なセンサフュージョン機能を兼ね備えているKudan SLAMは、様々な産業におけるアプリケーションに対応できる汎用性を持っております。Vecowと共に、私たちは、両社の技術によるパートナーシップを大いに活用することで、業界にインパクトを与え続けることを約束します。また、先見性のある企業が団結すると、イノベーションに限界はないと信じています。
Vecow ビジネスデベロップメントマネージャー(BDM)Alex Liu氏のコメント
今回の連携は、単一のハードウェアやソフトウェアに限定されるものではなく、ソフトウェアとハードウェアの統合という完全なソリューションを包含するものであり、両社の技術力を示すものです。
Vecowの時刻同期技術は、Kudanの3D-LidarマッピングのSLAMとセンサフュージョン機能と組み合わされ、屋外の自律移動ロボットや車両向けセンサデータの精度とロバスト性を圧倒的に高めることを目指しています。Kudanとの更なるビジネス連携の可能性に期待しています。
※ループクローズ:過去に訪問した地点を再訪問する際に、推定された軌跡と地図の累積誤差を検出して修正するプロセス。
【Vecowについて】
Vecowは、グローバルな組込み技術専門企業であり、顧客の信頼できる組込みビジネスパートナーとなることを目指しています。高い信頼性、高度な技術、革新的なコンセプトを備えた高品質なAIoTソリューションの設計、開発、生産、供給に取り組んでいます。Vecowの商品には、AI対応推論システム、AIコンピューティングシステム、ファンレス組込みシステム、車載向けコンピューティングシステム、ロバストコンピューティングシステム、シングルボードコンピューター、マルチタッチコンピューター/ディスプレイ、画像入力ボード(フレームグラバー)、そして、マシンビジョン、自律走行車、スマートロボティクス、デジタル鉄道、パブリックセキュリティ、交通・V2X、スマートファクトリー、ディープラーニング、あらゆるエッジAIアプリケーション向けの組込み周辺機器及び設計・製造サービスなどがあります。
Vecowはさまざまな垂直市場アプリケーションに向けて産業用ハードウェアシステムとソリューションを提供するグローバルリーダーである台湾のEnnoconn Corporation(6414. TW)の子会社です。また、Ennoconn CorporationはFoxconnグループの一員です。
詳細な情報は、Vecowのウェブサイトをご参照ください。
https://jp.vecow.com/dispPageBox/vecow/VecowHp.aspx?ddsPageID=VECOW_JP
【Kudan株式会社について】
Kudanは、人工知覚(AP)のアルゴリズムを専門とするDeep Tech(ディープテック)の研究開発企業です。人工知覚(AP)は、人工知能(AI)と相互補完する技術として、機械を自律的に機能する方向に進化させるものです。現在、Kudanは高度な技術イノベーションによって幅広い産業にインパクトを与えるDeep Techに特化した独自のマイルストーンモデルに基づいた事業展開を推進しています。
詳細な情報は、Kudanのウェブサイト(http://kudan.io/jp/)をご参照ください。
■会社概要
会 社 名: Kudan株式会社
証券コード: 4425(東証グロース)
代 表 者: 代表取締役CEO 項 大雨
■お問い合わせ先はこちら